
ID : 3398
机器人3台、传送带1台的构成
传送带的运动快,用2台机器人不能完全取拿等时,针对1台传送带,使用3台机器人。
在此针对系统构成的内容,分下述项目做了说明。
系统构成图
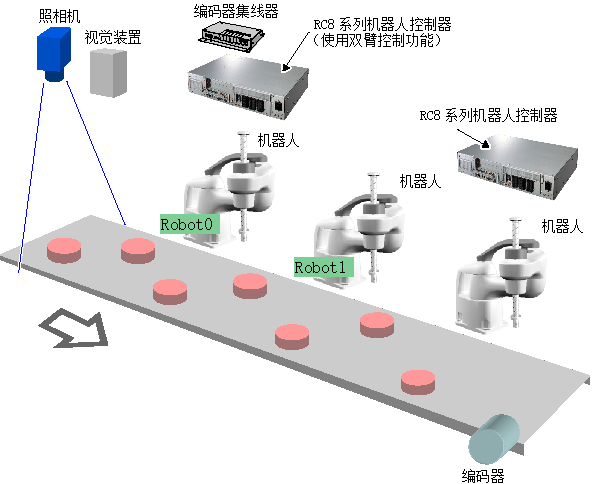
上图是视觉跟踪的系统构成例子。
接线图
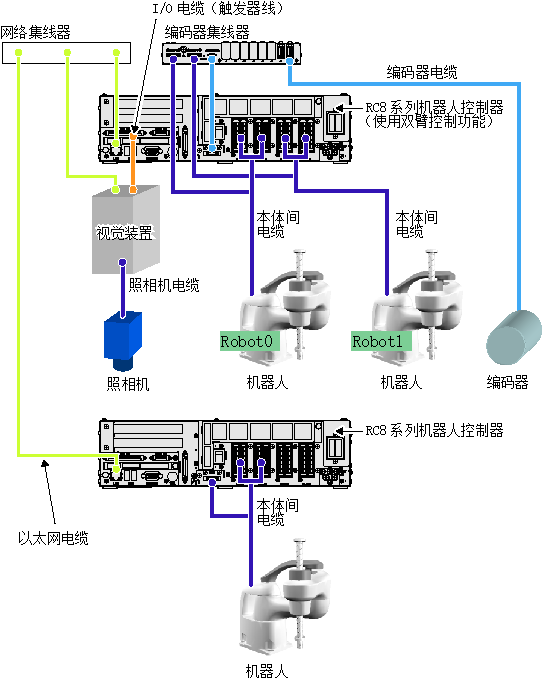
上图是视觉跟踪的系统构成例子。
有关可接在编码器集线器上的编码器的数量与轴编号,请参照 “可使用的编码器的数量与轴编号” 。
关于编码器集线器
编码器集线器有旧件和新件。
上述接线只能在新件上使用。新件附带2个与机器人连接的连接器。

有关外形尺寸及设置上的注意,请参照“编码器集线器”。
注意事项
在此将使用双臂控制功能的机器人控制器叫做“双臂控制器”,将不使用双臂控制功能的控制器叫做“通常控制器”。
- 进行系统的探讨、构建时,也需要双臂控制功能的知识,因此请一并阅读 “双臂控制功能使用说明书” 。
-
并用双臂控制功能与传送带跟踪功能时,可在双臂控制器上使用的机器人仅限下述的机器人。另外,不能使用外部附加轴。
- HSR
- HSA1
- 用MC8系列动作控制器进行控制的机器人
通常控制器没有上述制约。
- 请在配置各机器人时避免相互干涉。
- 双臂控制器所需的传送带跟踪功能的许可证数量为1个。不需要准备2个。对于通常控制器,1台通常控制器需要1个许可证(对于上图的情形,需要共计2个许可证)。
- 请使用附加轴规格的双臂控制器。
-
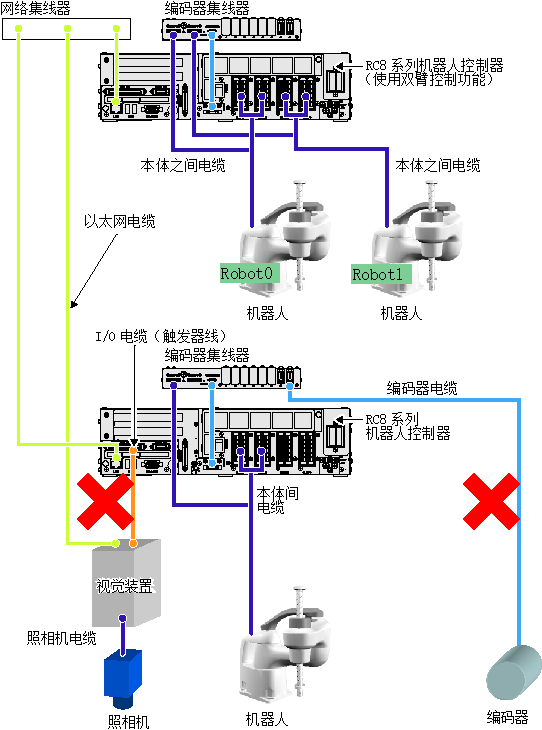
传送带的编码器与视觉装置的触发器线请务必接在双臂控制器上。如果接在通常控制器上,不会正常动作(参照下图)。
- 用4台机器人挑选1台传送带的工件时,可应用双臂控制功能的机器人控制器只有1台。不能在2台机器人控制器上应用双臂控制功能,共计4台机器人进行传送带跟踪。
ID : 3398