
ID : 3068
RC8A 安全动作规格安全用信号的配线
以下就机器人控制器为RC8A 安全动作规格时的安全用信号配线方法进行说明。
在整体系统中属于下图的“安全用信号的配线”与“Motion I/O输入信号的配线”部分。
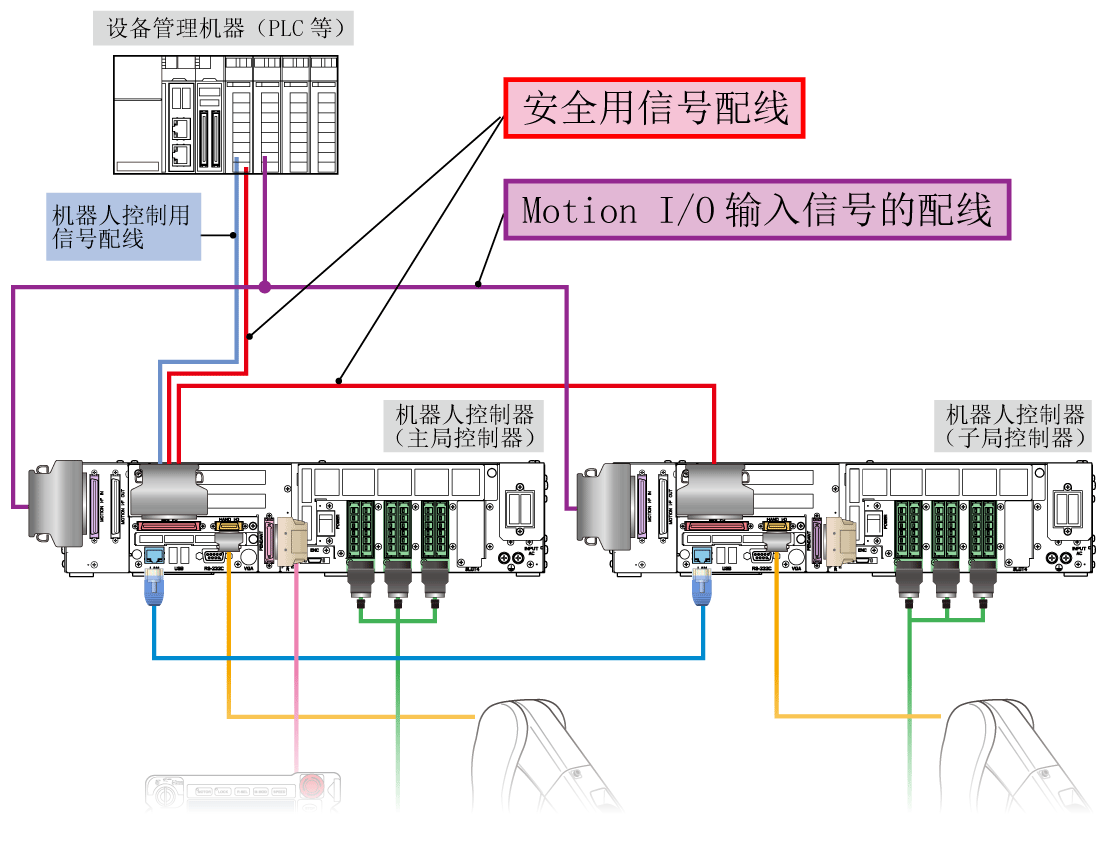
连接的安全用信号
无论主局控制器还是子局控制器,都连接以下的信号(全部都是Mini I/O的信号)。
- 外部紧急停止输入
- 防护停止输入
- 自动允许输入
对于主局控制器,从设备管理机器连接到上述信号。
在主局控制器的输出信号中,可在子局控制器上利用与上述输入信号联动的信号。例如,如果自动允许输入接通,自动模式相互监视(输出)与之联动,也随之接通(需要多功能教导器或者小型教导器的模式切换开关为“AUTO”)。也就是说,主局控制器的自动模式相互监视(输出)可作为子局控制器的自动允许输入信号利用。
但是,预先短接子局控制器的防护停止输入。
在子局控制器的Mini I/O信号中,以下的信号不动作。
请避免配线。
| 信号 | 端子No. |
|---|---|
专用输入输出信号 但是,以下的信号除外
|
从No.11到No.26与从No.46到No.60 |
| 通用输入输出信号 |
安全用信号的配线示例
如果要联动的机器人为2台,可以将主局控制器的安全用信号直接连接到子局控制器,因此也可以使电路构成变得更简单(部分使用继电器)。
如果要联动的机器人在3台以上,则需要通过继电器将主局控制器的安全用信号分配到各子局控制器。
请参照下述参照位置的配线示例。
Mini I/O的配线有使用“Mini I/O电缆”的方法与使用“Mini I/O连接器组件”的方法(二者都是选件)。
“Mini I/O 连接器组件”为仅连接器的产品。电缆需要客户自行准备,但是具有易于将主局控制器的Mini I/O配线分成设备管理机器和子局控制器二种机器的优点。
各选件的件号和连接器的引脚排列请参照下表。
- 选件件号
-
选件名 选件号 Mini I/O电缆(68引脚) 8 m 410141-270* 15 m 410141-271* Mini I/O连接器组件 410159-019*
- 连接器的引脚排列
-
Mini I/O的型号 I/O配置模式 参照位置 NPN Mini I/O专用 请参照“[NPN型]RC8A Mini I/O引脚排列(Mini I/O专用)”。 非Mini I/O专用 请参照“[NPN型]RC8A Mini I/O引脚排列(非Mini I/O专用)”。 PNP Mini I/O专用 请参照“[PNP型]RC8A Mini I/O引脚排列(Mini I/O专用)”。 非Mini I/O专用 请参照“[PNP型]RC8A Mini I/O引脚排列(非Mini I/O专用)”。
Motion I/O输入信号的配线
在连接时,要使Motion I/O输入信号同时传递到主局控制器和子局控制器。
Motion I/O输入信号的配线例
如果要联动的机器人为2台,可以使电路构成变得更简单。
如果要联动的机器人在3台以上,则需要通过继电器将Motion I/O的输入信号分配到主局控制器及子局控制器。
请参照下述参照位置的配线示例。
同步动作中或协调动作中,若执行SS2功能或RSM功能,则在减速动作中或减速动作后将可能发生错误。
对Motion I/O输入信号进行配线时使用“MOTION INPUT 电缆”选件。
选件的选件号与连接器的引脚排列如下所示。
- 选件件号
-
选件名 选件号 MOTION INPUT 电缆(68引脚) 8 m 410141-656* 15 m 410141-657*
- 连接器的引脚排列
- 请参照“Motion I/O输入信号 引脚排列”。
ID : 3068