
ID : 2978
[传感器跟踪]自由曲线插补的设置步骤
说明通过传感器跟踪执行自由曲线插补动作(TrackMove S)时的设置步骤。
使用2台以上的机器人进行时,请按照以下步骤进行子局控制器的[自由曲线设定]。
- 从主局控制器的跟踪画面按[F1 触发器检测开始]。
- 指定想用子局控制器设定的传送带编号。
- 从子局控制器的跟踪画面进行[自由曲线设定]。
1
操作路径:[F10 跟踪]
按进行自由曲线插补的传送带的[自由曲线设定]按钮。
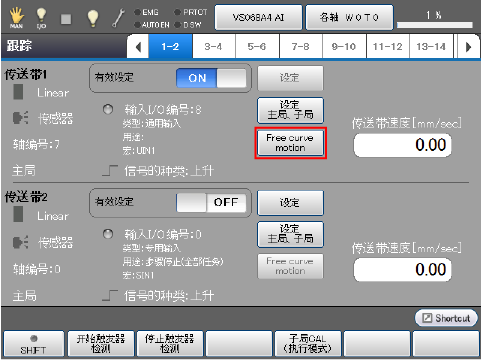
正在通过[自由曲线设定]设定路径点时,请不要变更工具及工件坐标。
2
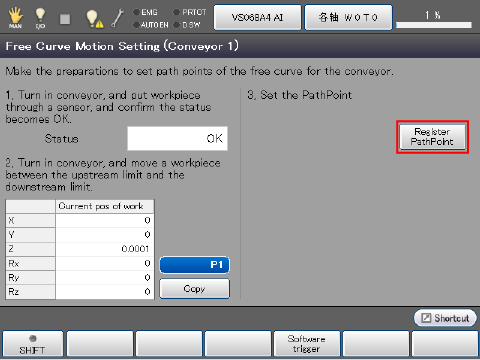
显示[自由曲线设定]画面。
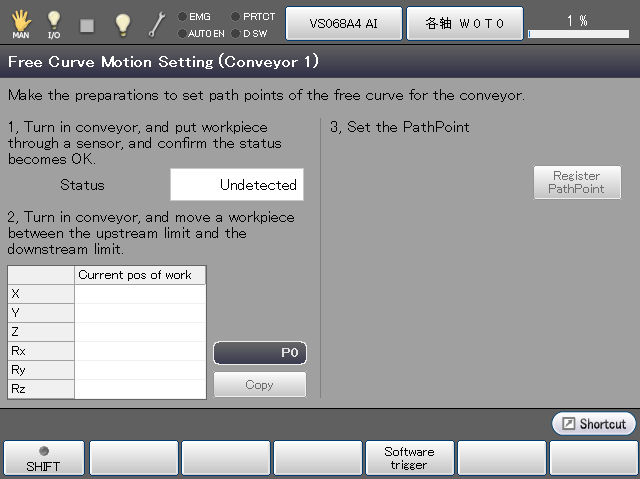
3
进行显示的预先准备。
- 转动传送带,使工件通过传感器,确认状态OK。
- 转动传送带,将工件移到上游上限与下游下限之间。
请将整个工件置于进入上游上限与下游下限之间的状态。
进行1、2的预先准备后,[设定路径点]按钮有效。
4
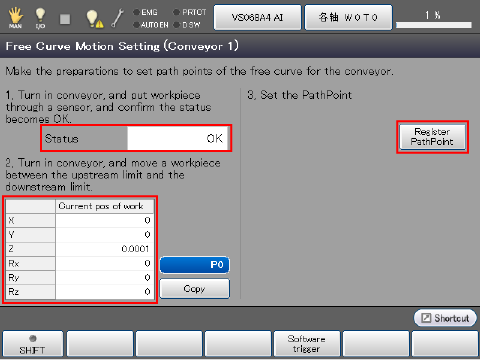
登录AddPathPoint用工件坐标。此功能可在Ver.2.7.*以后使用。
不使用AddPathPoint时,不需要此操作。
点击变量编号的显示部位,显示[复制目标位置变量编号输入]的数字键画面,输入编号后按[OK]。
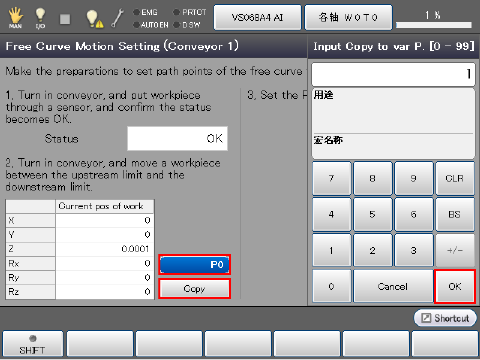
如果按[变量保存]按钮,工件的当前位置被复制到变量中。
将在此登录的位置作为AddPathPoint的指定项目的“工件坐标”使用。
5
按[设定路径点]按钮,显示设定路径编号的数值输入画面,因此指定想注册路径点的路径编号,按[OK]。
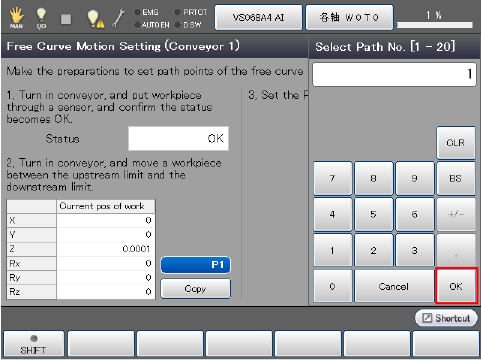
6
在[设定路径点]画面上,使机器人移到示教位置,按[添加]按钮。
详细的画面说明请参考“设定路径点画面”。
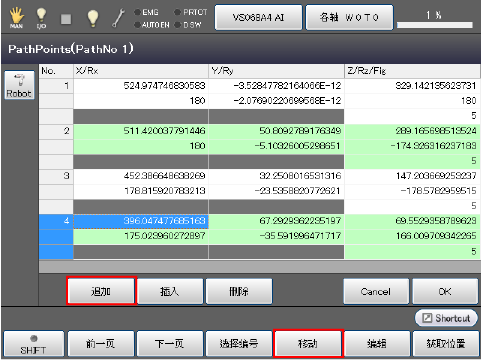
- 在[设定路径点]画面上,请不要移动传送带。
- 根据路径点的示教位置,可能朝上游上限以上的位置进行跟踪动作。
想调整跟踪开始位置时,请使用TrackInRange。
7
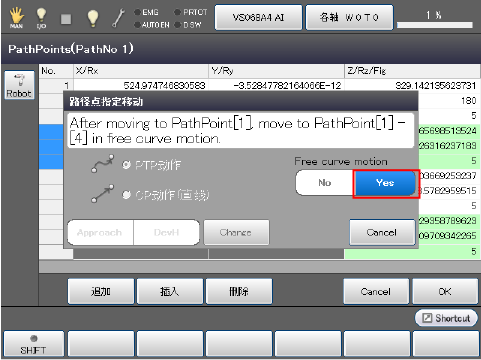
示教所有的路径点后,用[F4 移动]确认路径点。
选择执行/不执行“自由曲线移动”。
- 不执行“自由曲线移动”
指定PTP动作或者CP动作后,选择路径点,按[移动]按钮。请一边按教导器的双重安全开关,一边持续按OK键。
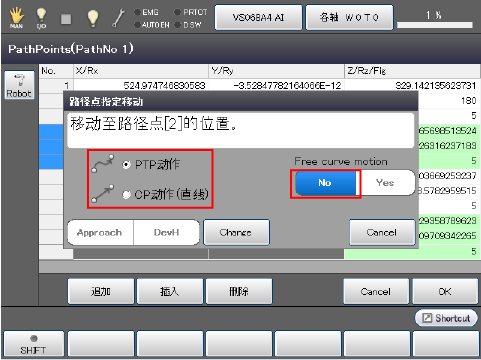
通过“接近”按钮指定接近距离后,移到指定了接近长度的位置。通过“DevH”按钮指定坐标(X、Y、Z、Rx、Ry、Rz)后,从变量位置移至偏移指定坐标量的位置。
- 执行“自由曲线移动”
移到路径点[1]后,通过自由曲线插补移动设定的所有路径点。请一边按教导器的双重安全开关,一边持续按OK键。
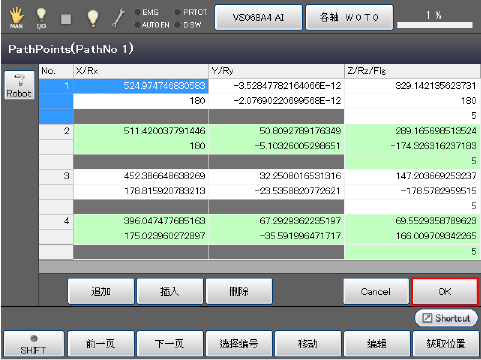
8
路径点的确认完成后,按[OK]按钮。
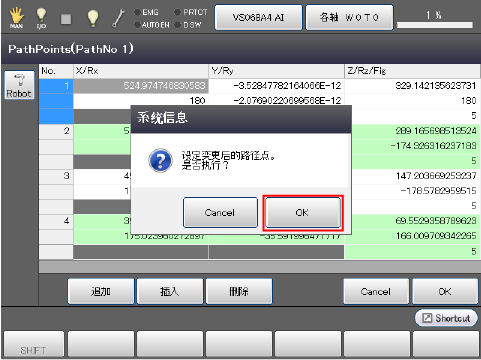
9
确认消息后,按压[OK]按钮。路径被登录。到此,自由曲线设定就完成了。
ID : 2978