
ID : 2888
参数的设定
说明参数的设定方法。
参数设定步骤
1 详细设定画面显示
在“跟踪”画面中按[F12 详细]。
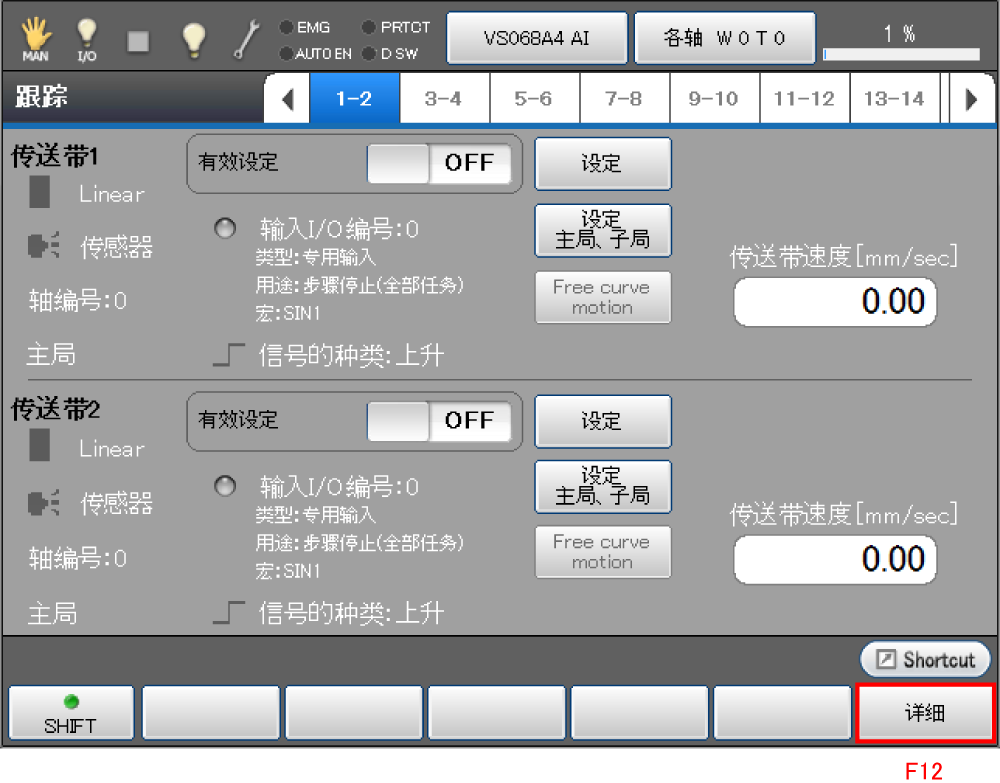
显示“传送跟踪”画面。
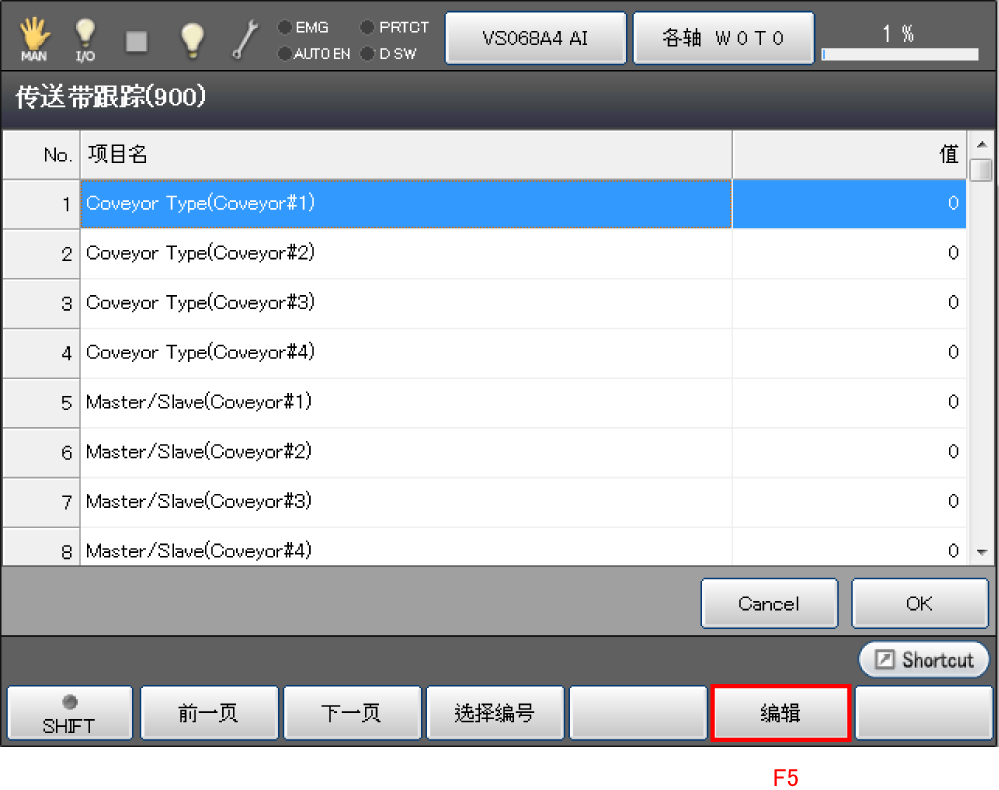
2 设定项目选择
选择设定的项目名后,按压[F5 编辑]。
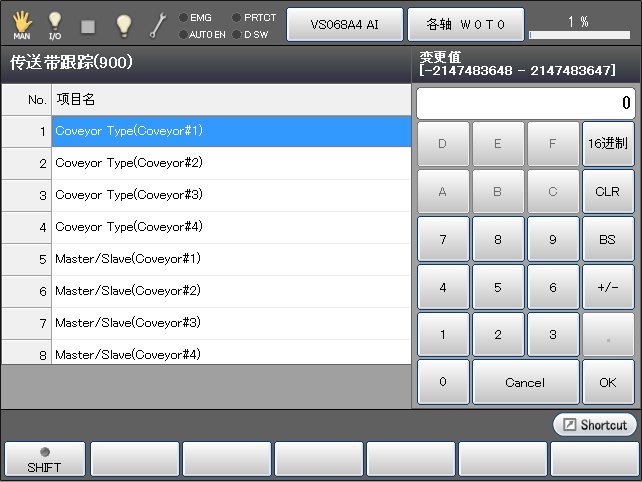
3 设定值变更
使用数字键输入参数值,再按压“OK”。
参数一览
在“详细”画面的参数中,未自动设定的参数详情如下所示。
| 项目名 | 内容 |
|---|---|
| 跟踪开始范围 | 参照“术语与定义”的相应项目。 朝上流方向偏移时,用负值设定。 |
| 最小工件间隔(视觉传感器) | 与跟踪缓冲区内存在的工件重复的数据 不用TrackSetVision指令登录所需的阈值。 |
| 编码器值LPE时间常数 | 对来自编码器的输入值进行过滤,抑制数值急剧波动。 如果过分增大数值,对输入值波动的响应性下降。 |
| 速度比例增益 | 提高转台的速度时,在机器人的跟踪精度变差时使用。 当机器人追不上工件时,请将数值设为大于1。 当机器人超过工件时,请将数值设为小于1。 |
| 恒定偏差调整量 | 机器人相对工件始终错开一定的量时,使用。 当机器人追不上工件时,请用正值[mm]指定。 当机器人超过工件时,请用负值[mm]指定。 |
ID : 2888