
ID : 2886
校准
概要
对于转台、视觉传感器、机器人,计测各自的正确的位置关系。
校准结果被当作如下所示的参数保存,执行跟踪动作时使用。
请对各转台执行校准。
与机器人和转台的位置关系有关的参数
| 参数名称 | 内容 |
|---|---|
| 传送带CALDATA值(X,Y) | 表示转台的旋转轴方向的基础坐标Z轴旋转的旋转角度[rad] |
| 传送带CALDATA值Z | 从表示转台的旋转轴方向的基础坐标XY平面看到的倾斜[rad] |
| 传送带进给量 | 编码器每旋转1周的转台的前进量[deg/rev] |
| 编码器旋转方向 | 转台从上游传送到下游时的编码器的旋转方向(1:正转、-1:反转) |
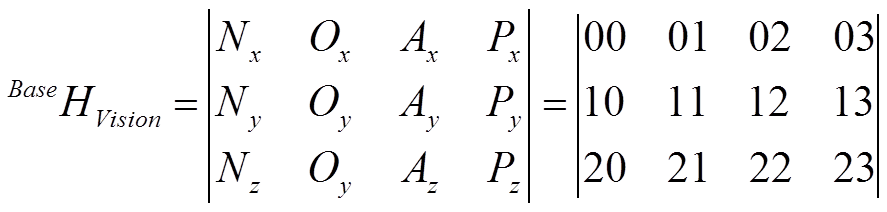
与机器人和视觉传感器的位置关系有关的参数
| 参数名称 | 内容 |
|---|---|
| CALDATA值(00) | 齐次变换型的Nx |
| CALDATA值(01) | 齐次变换型的Ox |
| CALDATA值(02) | 齐次变换型的Ax |
| CALDATA值(03) | 视觉传感器检测位置X[mm] |
| CALDATA值(10) | 齐次变换型的Ny |
| CALDATA值(11) | 齐次变换型的Oy |
| CALDATA值(12) | 齐次变换型的Ay |
| CALDATA值(13) | 视觉传感器检测位置Y[mm] |
| CALDATA值(20) | 齐次变换型的Nz |
| CALDATA值(21) | 齐次变换型的Oz |
| CALDATA值(22) | 齐次变换型的Az |
| CALDATA值(23) | 视觉传感器检测位置Z[mm] |
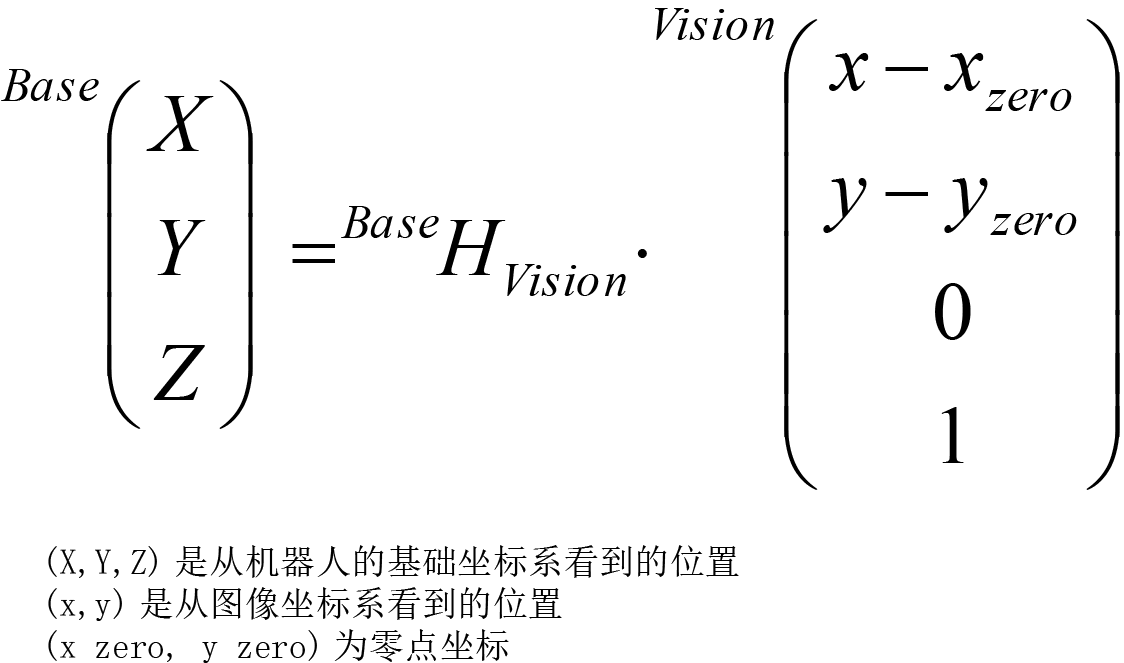
| 参数名称 | 内容 |
|---|---|
| 零点坐标X | 图像坐标上的X[pixel] |
| 零点坐标Y | 图像坐标上的Y[pixel] |
| 参数名称 | 内容 |
|---|---|
| 传送带基准坐标RX | 工件夹持基本姿势的RX[deg] |
| 传送带基准坐标RY | 工件夹持基本姿势的RY[deg] |
| 传送带基准坐标RZ | 工件夹持基本姿势的RZ[deg] |
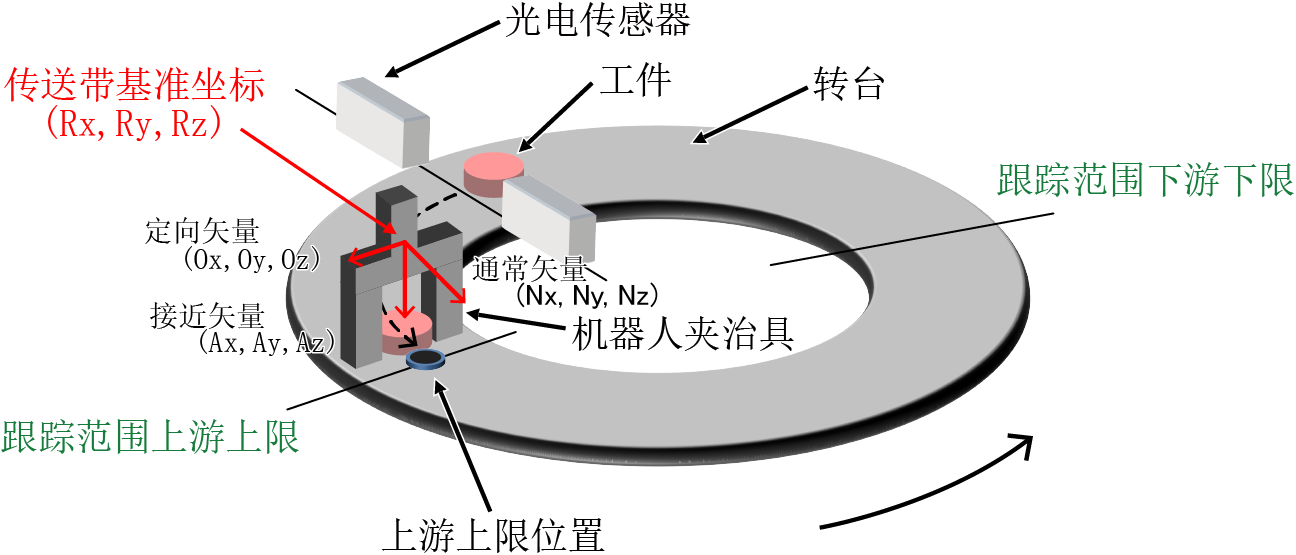
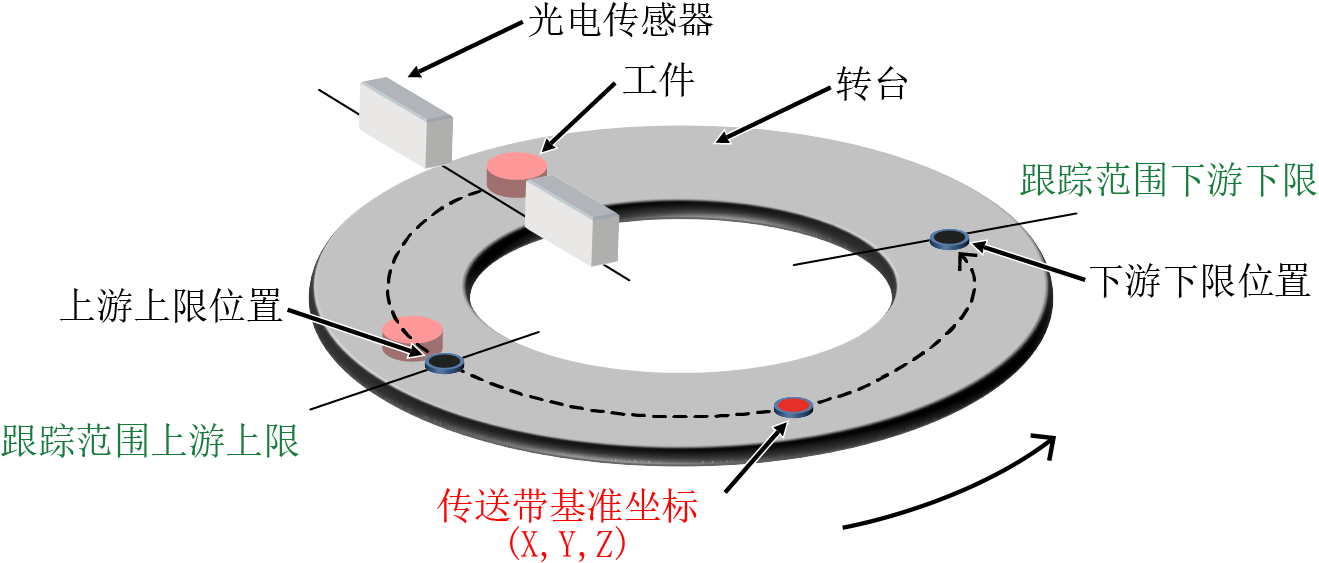
与跟踪范围有关的参数
| 参数名称 | 内容 |
|---|---|
| 跟踪范围上游上限 | 机器人可开始追踪动作的上流侧位置[mm] |
| 跟踪范围下游下限 | 机器人停止追踪动作并开始减速的下流侧的位置[mm] |
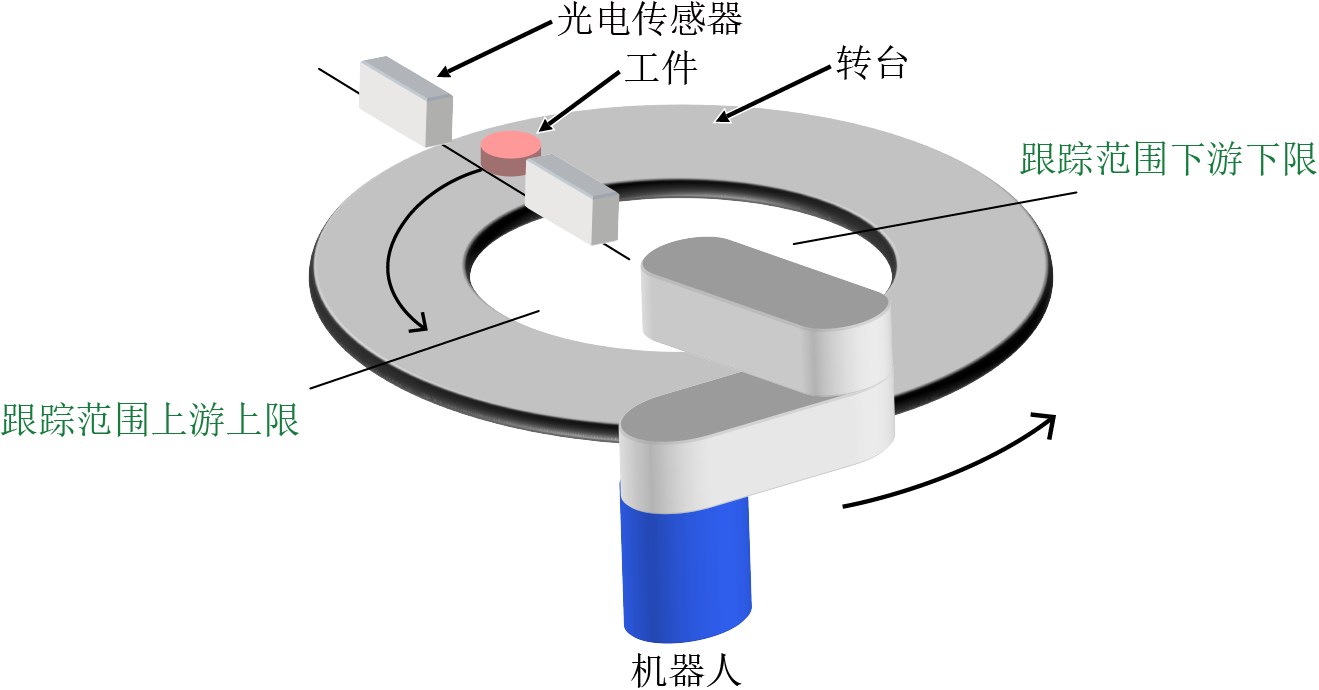
| 参数名称 | 内容 |
|---|---|
| 传送带基准坐标X | 上游上限位置和下游下限位置的中点位置X[mm] |
| 传送带基准坐标Y | 上游上限位置和下游下限位置的中点位置Y[mm] |
| 传送带基准坐标Z | 上游上限位置和下游下限位置的中点位置Z[mm] |
ID : 2886