
ID : 2887
传送带校准执行步骤
按照如下步骤执行传送带校准。
1 校准步骤的确认
确认校准步骤后,按[下一步]。

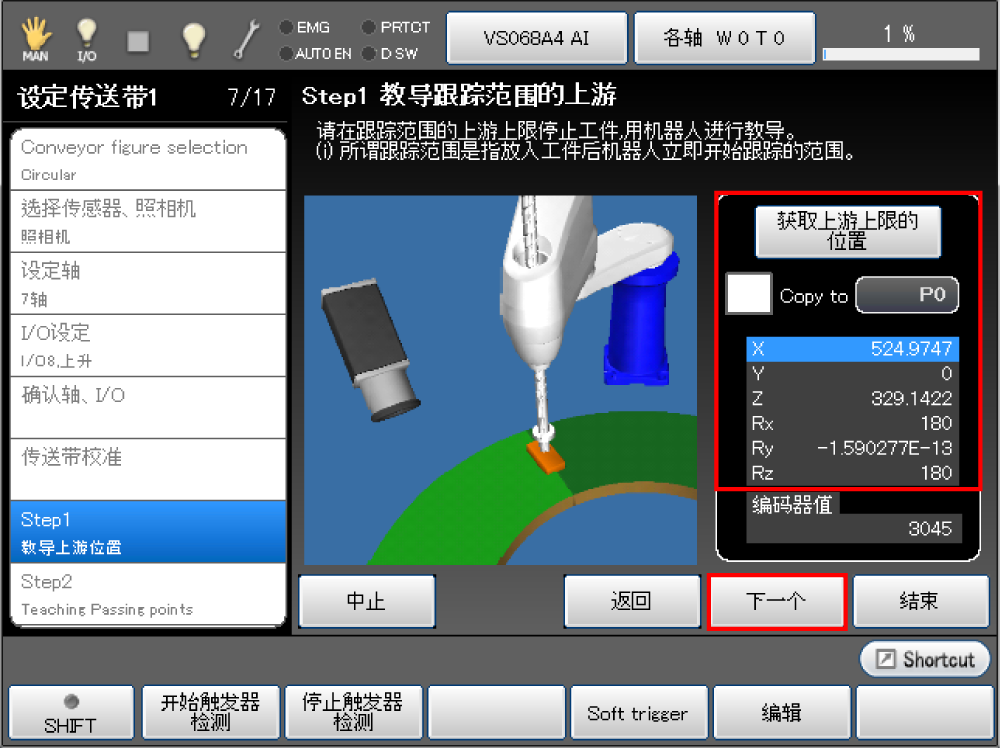
2 跟踪范围上游上限的示教
将工件停在跟踪范围上流侧的界限位置,将机器人移至工件上部,并按[获取上游上限的位置]。
获取机器人位置。
确认获取的值,如果正确,则按[下一步]。
- 再次获取机器人位置时,显示是否获取位置的系统讯息。
- 根据获取上游上限的位置时的姿势,算出工件夹持基本姿势。
按压编辑按钮后,可变更位置的坐标。
使用获取转台上流和下流位置的坐标和此时获取的编码器值,计算转台的进给量和方向。因此,请在考虑影响转台的进给量和方向的因素后,再编辑坐标值。
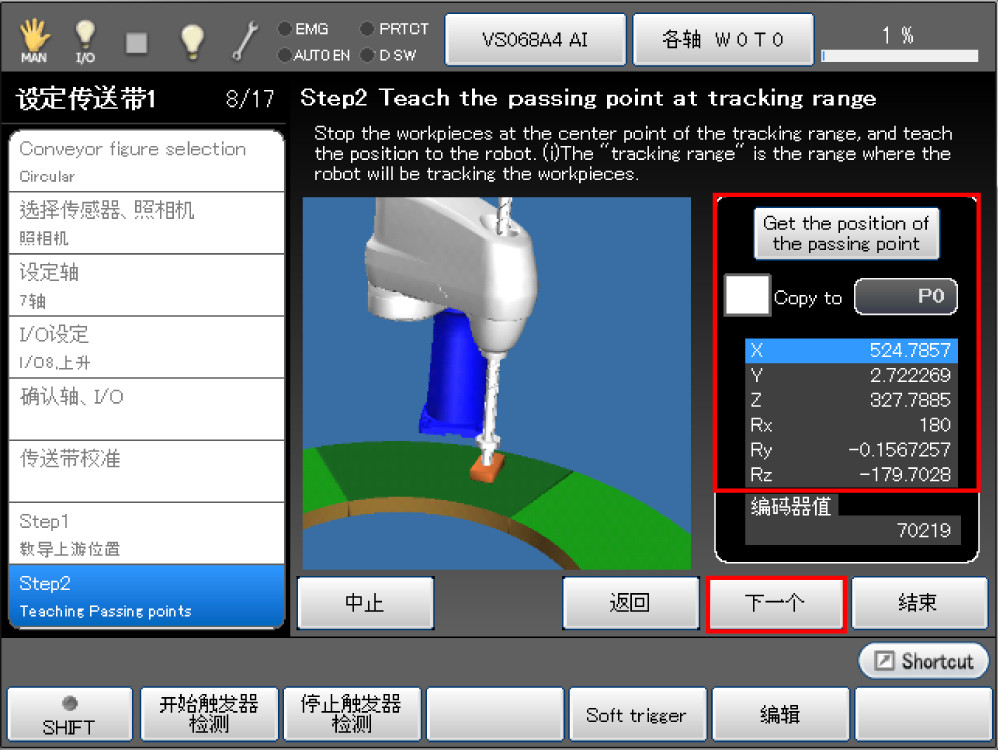
3 跟踪范围经过点的示教
将工件停在跟踪范围的中途,将机器人移至工件上部,并按压[获取经过点位置]。
获取机器人位置。
确认获取的值,如果正确,则按[下一步]。
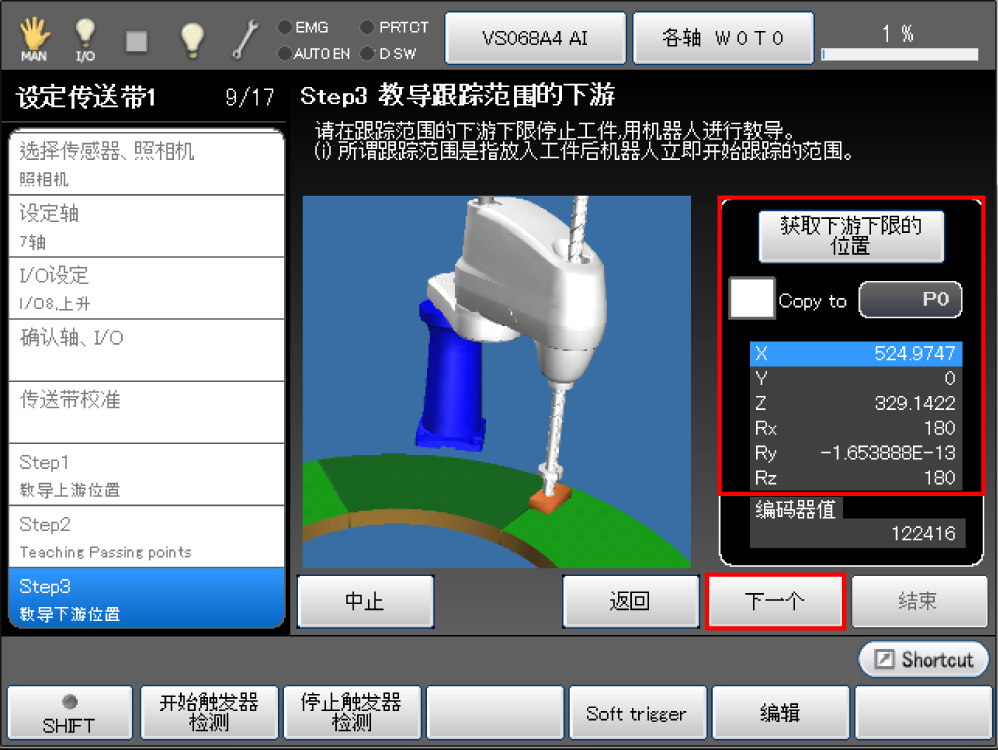
4 跟踪范围下游下限的示教
将工件停在跟踪范围下流侧的界限位置,将机器人移至工件上部,并按压[获取下游下限的位置]。
获取机器人位置。
确认获取的值,如果正确,则按[下一步]。
上游上限位置和下游下限位置的中点位置就是传送带基准位置。
5 校准结果的确认
显示计算出的参数值后,确认内容,并按压[下一页]。
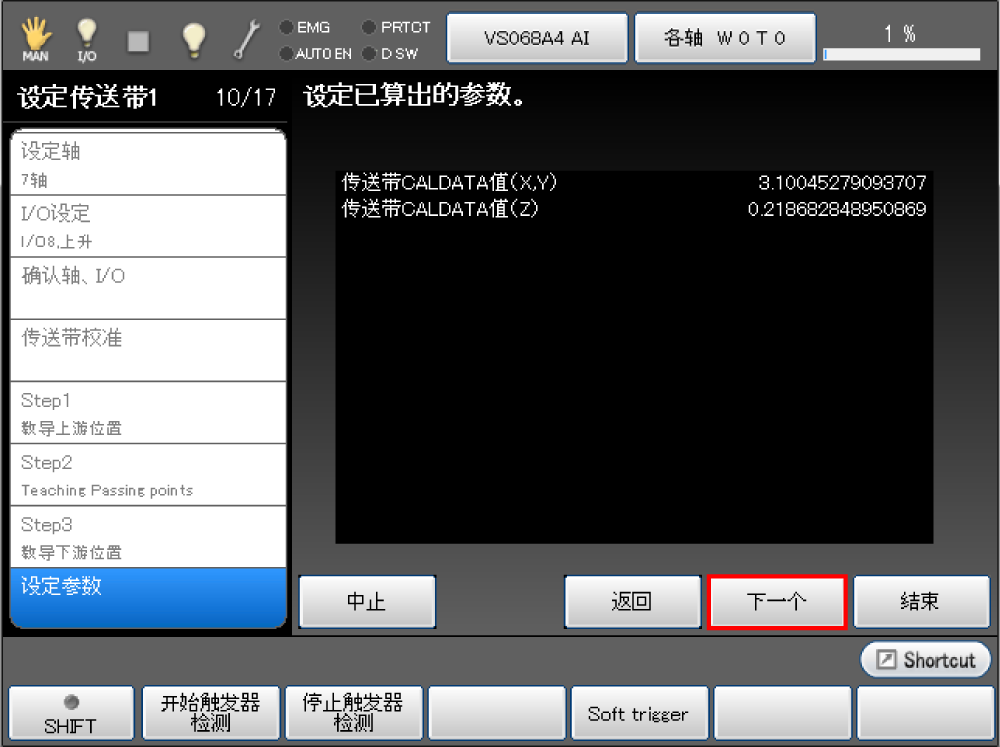
继续“校准照相机”。
ID : 2887