
ID : 2602
RSM输出
功能
输出控制器RSM功能的有效状态。(2系统)
端子编号
| 信号名称 | 端子编号 |
|---|---|
| RSM1输出(系统1) | MotionI/O Output的No.3、37 |
| RSM1输出(系统2) | MotionI/O Output的No.17、51 |
| RSM2输出(系统1) | MotionI/O Output的No.5、39 |
| RSM2输出(系统2) | MotionI/O Output的No.19、53 |
| RSM3输出(系统1) | MotionI/O Output的No.7、41 |
| RSM3输出(系统2) | MotionI/O Output的No.21、55 |
使用方法
用于RSM功能的状态确认。
详细内容请参照“安全电路(安全动作)”。
ON条件
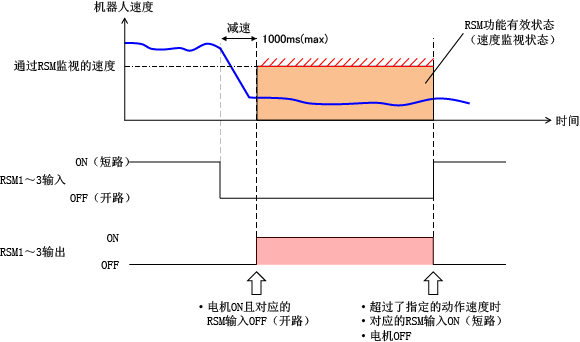
在电机ON状态下,RSM功能有效时ON。
- 自动模式
・RSM1输入OFF(开路)时,打开RSM1输出。
・RSM2输入OFF(开路)时,打开RSM2输出。
・RSM3输入OFF(开路)时,打开RSM3输出。 - 手动模式
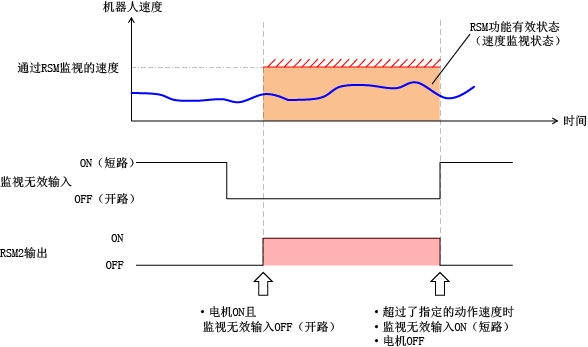
由于以250mm/s限制、监视机器人动作速度,因此不论RSM1~3输入如何,都只有RSM2输出ON。
OFF条件
- 自动模式
・机器人超过指定的速度时OFF。
・RSM1~3输入ON(短路)时,对应的RSM1~3输出OFF。
・电机OFF时,RSM1~3输出OFF。 - 手动模式
・机器人超过250mm/s时,RSM2输出OFF。
・监视无效输入ON(短路)时,RSM2输出OFF。
・电机OFF时,RSM2输出OFF。
状态图
自动模式
手动模式
ID : 2602