
ID : 2240
监视模型的创建
利用WINCAPSIII的臂建模功能创建监视模式,输出数据。
监视模型的创建步骤
1
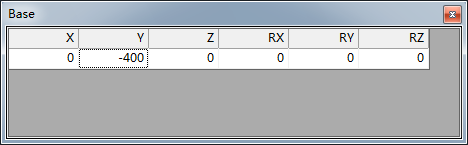
用多台机器人进行时,在世界坐标系设定排除区域。首先,定义基础。
操作路径:菜单[显示(V)] - [机械臂坐标系] - [基础]
使用该功能时,请将用户参数“190:启动时BASE编号”设定为“1:有效”。
如果有效,基础坐标系的变更就会反映到臂3D视图中。
在控制器上即使变更基础定义,也不会反映到监视模型中。
通过多功能教导器变更基础定义,用WINCAPSIII接收控制器的基础定义,进行“排他控制数据输出”,发送到控制器。
通过Base指令变更的基础定义在WINCAPSIII中无法接收,因此无法在监视模型中反映。
2
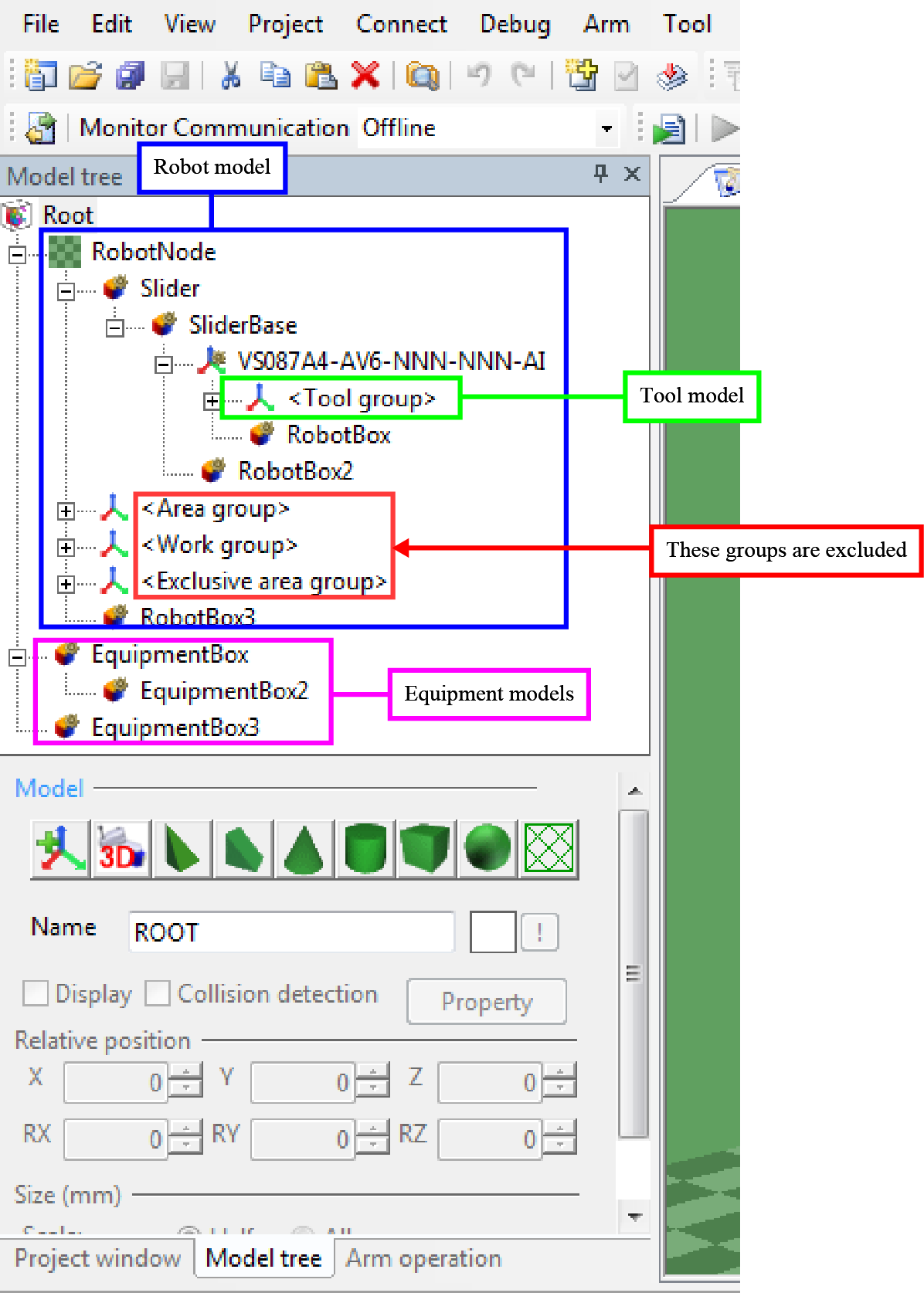
利用WINCAPSIII的臂建模功能创建模型。
创建监视模型时,对各监视模型有制约。
请在指定的层级创建各监视模型。
| 监视模型名 | 制约 | 详细 |
|---|---|---|
| 机器人模型 | 在Robot Node以下,除工具组、区域组、工件组、排他组以下的对象。 | - |
| 工具模型 | 工具组以下的对象。 | 工具编号以下的工具模型在工具编号变更后有效。 工具组正下方的工具模型与工具编号无关监视。 |
| 设备模型 | 位于Root正下方,除Robot Node外的对象。 | - |
3
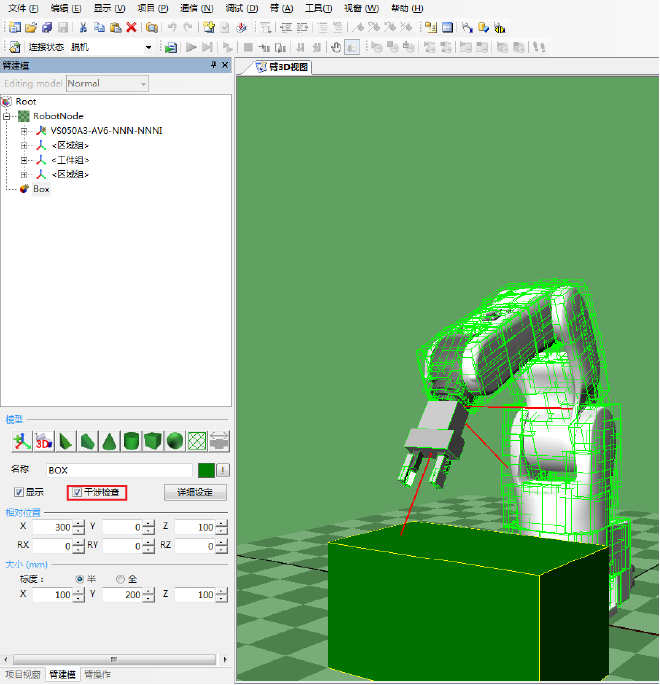
选择对象,将“干涉检查”设为有效。
4
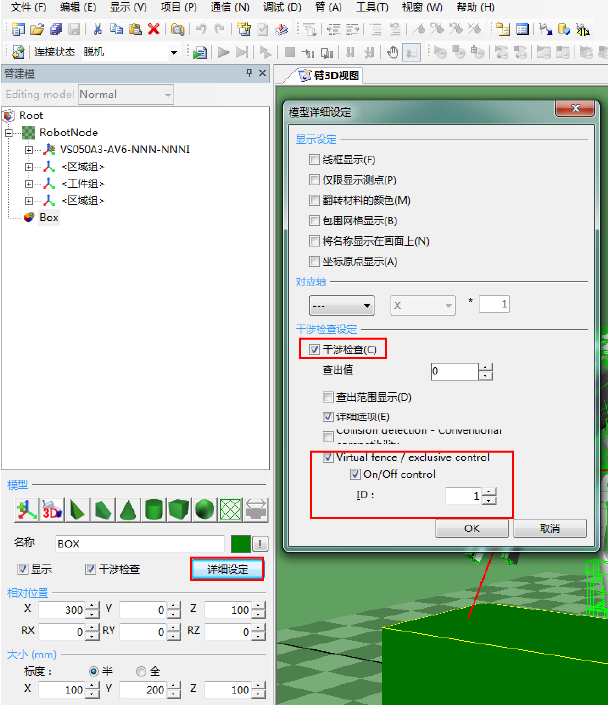
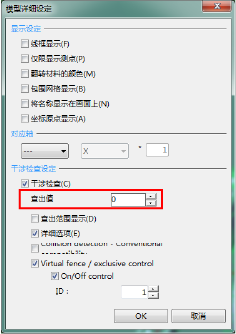
从“详细设定”打开“模型详细设定”,将虚拟栅栏设为有效。
如果勾选“On/Off控制”,附上ID编号(0~999),可以使用VirtualFence指令切换监视的On/Off(Ver.2.0.*或更高) 。
如果将“检测范围显示”设为有效,显示监视模型。
机器人始终处于涉检查有效的状态。
5
设定检测等级。
如果提高等级,精度更好,能够更加细致地监视,但如果太高,测量时间变长,可能发生测量时间延迟错误。
6
针对想监视的全部模型,重复STEP2至STEP4。
7
将虚拟栅栏的数据转换为可用控制器处理的数据后保存。
菜单[机械臂]-[虚拟栅栏/排他控制数据输出(V)]
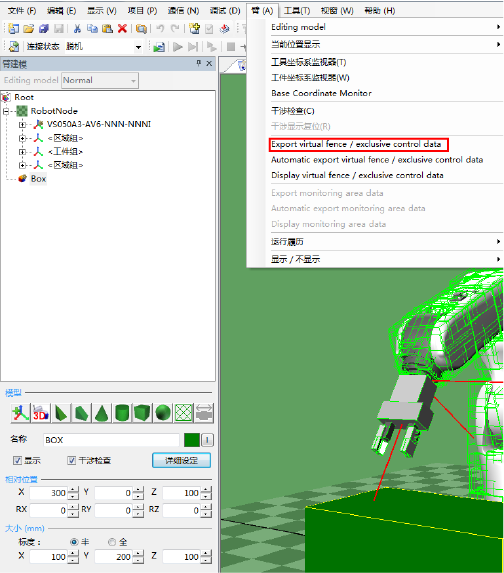
想确认输出的虚拟栅栏的数据时,可通过菜单[机械臂]-[虚拟栅栏/排他控制数据显示(D)]确认。
8
将数据发送给控制器。
请参照WINCAPSIII指南中的“通信设定”及“发送接收数据”。
发送数据后,请重新启动控制器。
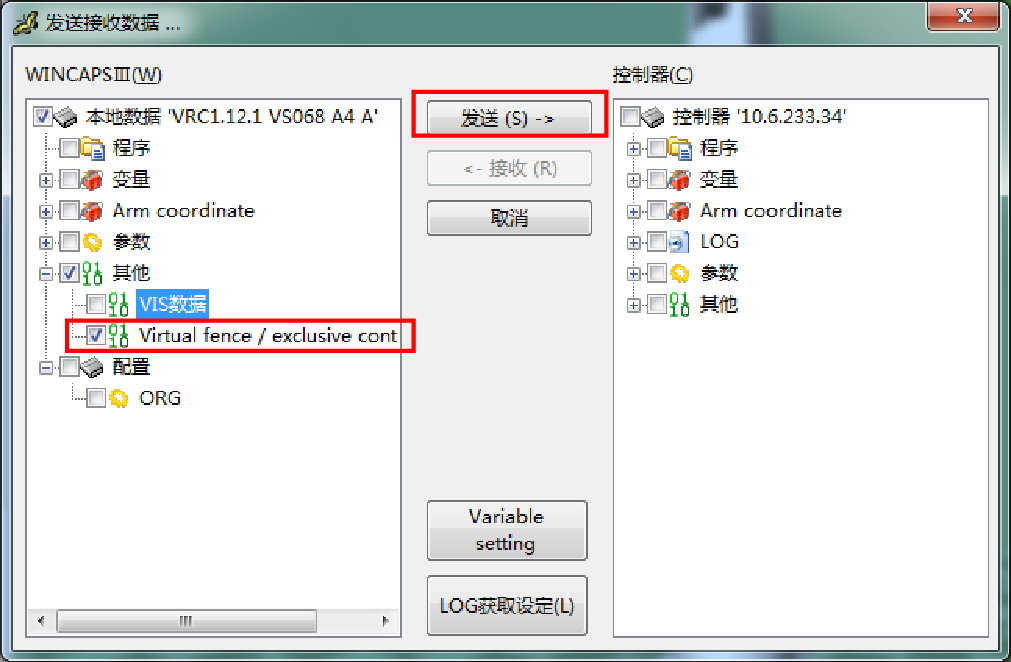
- 执行该作业时,需要控制器和WINCAPSIII可进行通信。
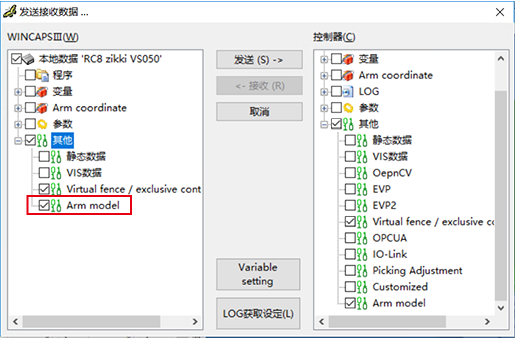
通信设定方法请参照WINCAPSIII指南中的“与机器人控制器的通信”。 - 勾选“机械臂模型”后,可以将制作虚拟栅栏/排他控制数据用的模型数据发送至控制器。但是,控制器内的保存空间不足时,不显示机械臂模型的项目。
Ver.2.11.*及更高版本可使用该功能。
9
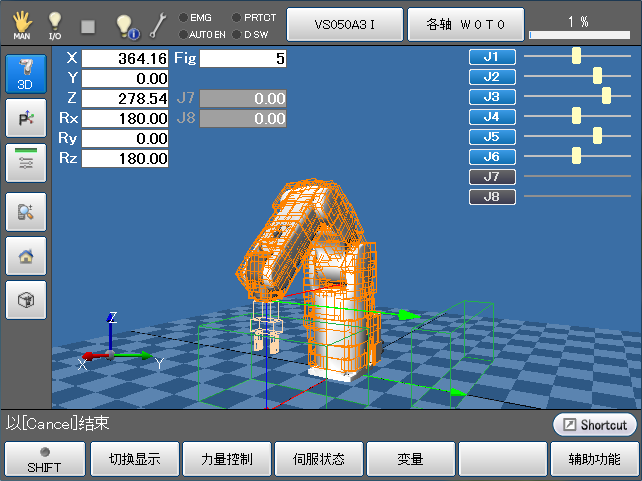
用多功能教导器打开机械臂画面。
要显示监视模型,请将想显示的监视模型的显示设定与参数的“366:虚拟栅栏设定”设为有效,重新启动控制器。
机器人模型以橘黄色表示,常时监视的模型以米黄色显示,可切换监视的模型以绿色(仅监视有效时)显示
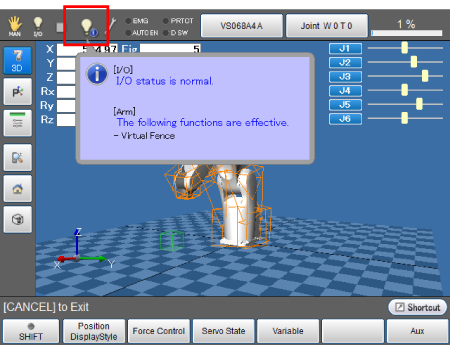
虚拟栅栏或者排他功能有效时,状态栏的“I/O状态、臂状态”的图标如图所示。如果点击图标,可知道详细的信息。
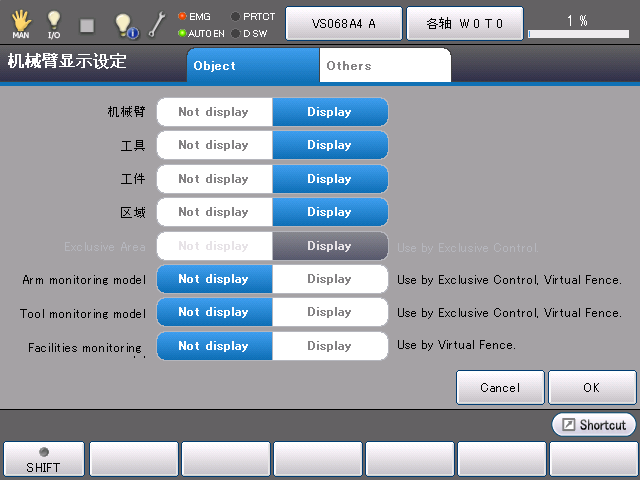
监视模型的显示/不显示
可设定监视模型的显示、不显示。
操作路径:基本画面 - [F2 机械臂] - [F6 辅助功能] - [F7 显示设定]
变更显示、不显示后,按[OK]。
ID : 2240