
ID : 1698
机器人初始设定
可以设定运行机器人所需的基本参数的机器人手臂前端的“负荷质量”(使用工具时,为其工具和前端负荷的合计质量)、“负荷重心”、以及以最佳速度、加速度控制这些负荷条件所对应的机器人所需的“最佳速度控制功能”。
设定负荷质量、负荷重心、最佳速度控制功能
关于机器人的运行条件,如果掌握了负荷质量(工具和其前端的负荷的合计质量)以及其重心,请按照下述步骤进行设定。
操作步骤
通过小型教导器无法进行该设定。使用多功能教导器或WINCAPSIII设定。
部分机器人可以使用简单设定功能设定。 详细内容请参照“简单设定(多功能教导器)”。(Ver.2.0.*之后)
1
按压基本画面上的[F2 机械臂]。
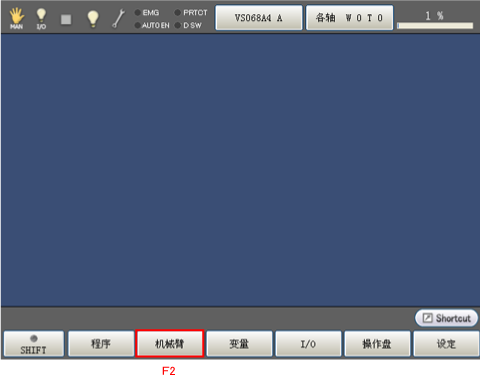
显示STEP2中所示的“机器人当前位置画面”。
2
按压[F6 辅助功能]。

(注1)根据显示内容的设定状况,显示画面可能存在部分不同。
STEP3所示的“机械臂辅助功能画面”被显示。
3
按压[F1 使用条件]。
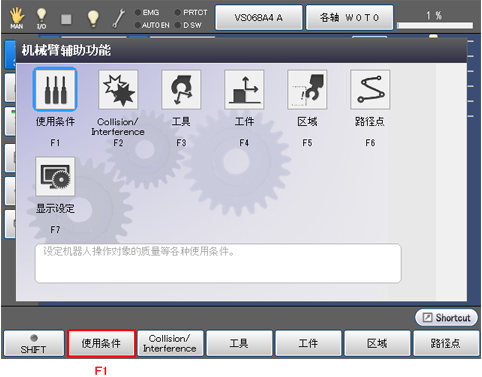
STEP4所示的“使用条件画面”被显示。
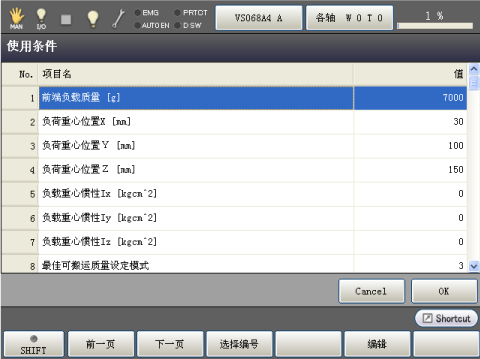
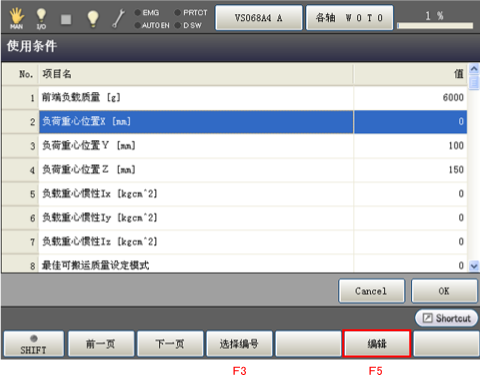
4
选择[1:前端负载质量[g]]。所选择的行反衬显示。
此处,按压[F5 编辑]。

STEP5所示的数字键被显示。
5
使用数字键,输入需要的数值。
要取消输入的数值,请按压[CLR]或者[BS]键。
确认输入的数值,若无问题按压[OK]。
按压[Cancel],取消该步骤操作,并返回原设定。

显示系统讯息后,如果正确,则请按压[OK]进行确定。
如果按压[Cancel],则不变更设定。
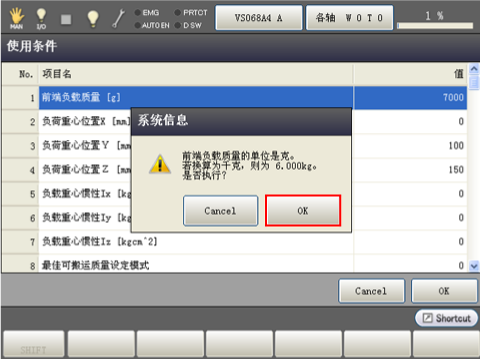
数字键消失,如下所示,[1:前端负载质量[g]]被新输入的数值更新。
如果按压[OK],则该值确定。如要取消,请按压[Cancel]。画面返回至原画面。
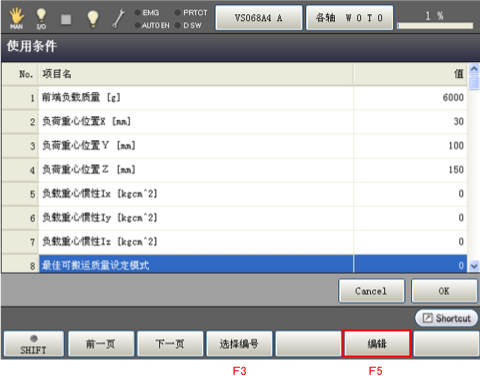
6
按压并选择[2:负荷重心位置X[mm]]。
所选择的行反衬显示。
通过漫步旋钮或[F3 选择编号]键也可进行选择。
此处,按压[F5 编辑]。
STEP7所示的数字键被显示。
7
使用数字键,输入需要的数值。
要取消输入的数值,请按压[CLR]或者[BS]键。
确认输入数值,如果没有问题则按压[OK]进行确定。
按压[Cancel],取消该步骤操作,并返回原设定。

数字键消失,如下所示,[2:负荷重心位置X(mm)]被新输入的数值更新。
如果按压[OK],则该值确定。如要取消,请按压[Cancel]。画面返回至原画面。
在安全动作规格中,如果安全参数的“最大端负载质量”小于使用条件(用户参数)的“前端负载质量”,按下[OK]时显示错误。(Ver.2.5.*以后有效)请清除错误,更改成正确的值。

8
同样设定[3:负荷重心位置Y[mm]]及[4:负荷重心位置Z[mm]]。
了解负荷重心惯量时,进行相同设定。
9
按压并选择[8:最佳可搬运质量设定模式]。
所选择的行反衬显示。
通过漫步旋钮或[F3 选择编号]键也可进行选择。
所选择的行反衬显示。
此处,按压[F5 编辑]。
STEP10所示的输入画面被显示。
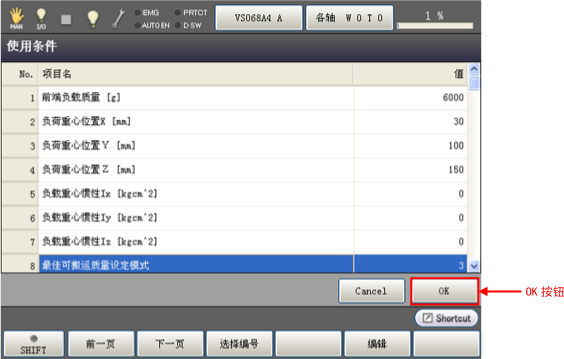
10
选择使用的项目,按压[OK]进行确定。
按压[Cancel],取消该步骤操作,并返回原设定。

输入画面消失,如下所示,[8:最佳可搬运质量设定模式]被新输入的数值更新。
如果按压[OK],则该值确定。如要取消,请按压[Cancel]。画面返回至原画面。

11
按压“使用条件画面”的[OK]按钮。
“机械臂辅助功能画面”被显示。

12
此处,按压2次[Cancel]键。
显示返回至“基本画面”。
在此设定的最佳速度控制参数,作为机器人的独立控制参数自动输入到控制器中。
ID : 1698