
ID : 38
机器人夹治具设计的注意事项
设计机器人夹治具时,以下项目不得超过机器人规格。(参照机器人的规格)
- 最大可搬运质量
- 最大容许惯量(惯性力矩)
- 最大容许力矩
夹治具设计的计算中不仅要考虑夹治具,还需考虑工件、配线、配管等对法兰施加负载的所有部件。
设计时不要使夹治具(包括工件)振动。
如果不遵守机器人夹治具设计的注意事项,则机器人本体的各紧固部位发生松动、晃动,可能引起错位并损坏机器人和机器人控制器。
持续进行微低速动作时,可能发生过载错误。
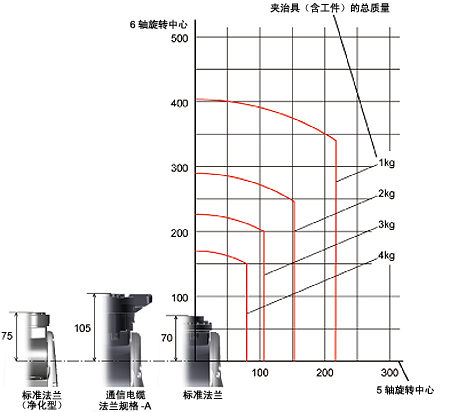
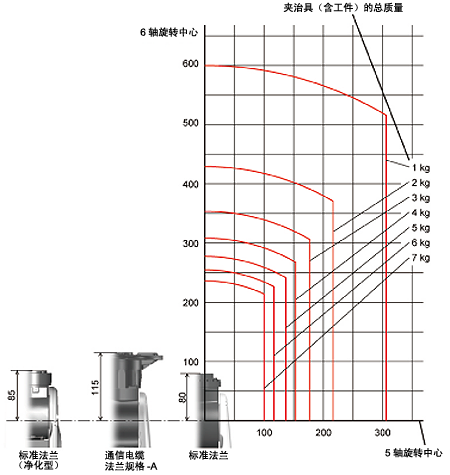
夹治具(包括工件)的体积较小时的重心位置分布如下图所示。参考下图设计夹治具。
VS-050/060
VS-068/087
计算设计的夹治具、工具的J4、J5、J6旋转惯性力矩时,请参考“夹治具设计相关计算示例”。
安装机器人夹治具时的注意事项
不要在基准孔φ5H7处施加外力,如用销钉敲入等。否则会造成故障。
关于基准孔,请参照“第6轴的CALSET位置(标准型机器人、标准法兰)”、“第6轴的CALSET位置(标准型机器人、通信电缆法兰规格-A)”或“第6轴的CALSET位置(防尘防溅型和抗恶劣环境型)”
。
ID : 38