
ID : 39
机器人的定位时间
关于VS-***系列机器人的定位时间,请参照附录的“各轴的定位时间”。收录有用于计算循环时间的各轴定位时间数据。
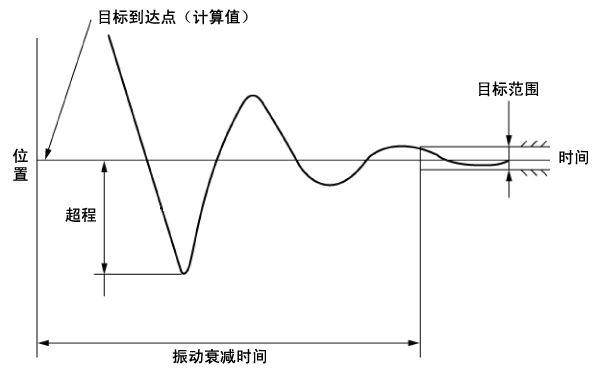
定位时间是指从机器人动作开始至到达目标点所需的时间。
如果使机器人向定位目标点动作,且超过目标到达点后,如下图所示,振动衰减并定位于目标点。图中不考虑该振动衰减时间。
振动衰减时间与夹治具等的重量有关。操作机器人时尤其是超程、振动衰减时间发生异常的情况下,请事前进行充分测试并确认。
机器人的余留振动停止前开始加速时,可能会显示过电流错误(ERROR6120号台“第1行表示轴编号”)。该情况下,可选择以下任一措施。
- 通过DECEL指令降低之前动作的减速度,减小余留振动。
- 通过DELAY指令等待,直至余留振动停止。
- 通过ACCEL指令降低加速度。
充分确认夹治具质量、工件质量后以最佳负荷设定值运行。如果设定值不合适,则可能导致机器人故障。
ID : 39