
ID : 5468
センサの設定
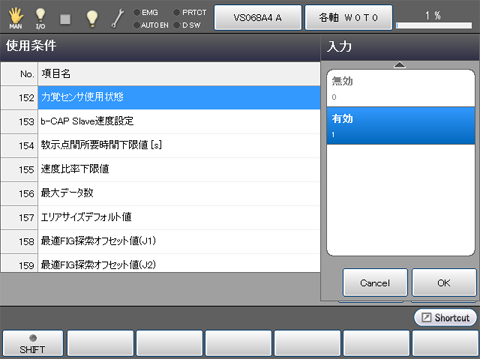
力センサの有効化
操作経路:基本画面 - [F2 アーム] - [F6 補助機能] - [F1 使用条件]
「使用条件」画面にて項目名「力センサ使用状態」を有効にします。
センサ種類の設定
操作経路:基本画面 - [F2 アーム] - [F2 力制御] - [F5 センサ] - [F1 センサ設定]
使用するセンサの種類を設定します。
詳細については下表を参照してください。
| No. | 項目名 | 内容 | 説明 |
|---|---|---|---|
| 1317 | センサ種類 |
0:WACOH |
株式会社ワコーテック製力センサを使用する場合に選択します。 |
|
1:ATI |
ATI Industrial Automation製力センサを使用する場合に選択します。 |
||
2:SINTOKOGIO |
新東工業株式会社製力センサを使用する場合に選択します。 |
||
|
3:Hypersen |
Hypersen製力センサを使用する場合に選択します。 |
設定したセンサ種類に応じて、下表のパラメータの初期値が切り替わります。
| センサ種類 | 切り替わるパラメータ | ||
|---|---|---|---|
| No. | 項目名 | 初期値 | |
| 0:WACOH | 1115 | ポート番号 | 5001 |
| 1314 | 接続方法 | 0(TCP) | |
| 1:ATI | 1115 | ポート番号 | 49152 |
| 1314 | 接続方法 | 1(UDP) | |
| 2:SINTOKOGIO | 1115 | ポート番号 | 10001 |
| 3:Hypersen | 1115 | ポート番号 | 8080 |
ハード設定
操作経路:基本画面 - [F2 アーム] - [F2 力制御] - [F5 センサ] - [F1 センサ設定]
ハード設定を行います。設定内容はセンサの種類によって異なります。詳細については、以下の内容を参照ください。
力センサを利用する力制御機能では、0x8320152F「力制御、制御力制限オーバ」は、センサで直接検出した力とモーメントが制限値を超えた場合に発生します。
制限値は「力センサ力検出範囲」と「力センサモーメント検出範囲」です。
株式会社ワコーテック製の力センサ
株式会社ワコーテック製の力センサは購入時にデータシートが同梱されてきますので、その設定値を入力してください。
| No. | 項目名 | 単位 |
|---|---|---|
| 1116 | 力換算値(X) | pulse/N |
| 1117 | 力換算値(Y) | pulse/N |
| 1118 | 力換算値(Z) | pulse/N |
| 1119 | モーメント換算値(RX) | pulse/Nm |
| 1120 | モーメント換算値(RY) | pulse/Nm |
| 1121 | モーメント換算値(RZ) | pulse/Nm |
| 1122 | 力センサ力検出範囲 | N |
| 1123 | 力センサモーメント検出範囲 | Nm |
ATI Industrial Automation製の力センサ
ATI Industrial Automation製の力センサの場合は、下記の値を設定してください。
| No. | 項目名 | 単位 | 設定値 |
|---|---|---|---|
| 1116 | 力換算値(X) | pulse/N | 1000000 |
| 1117 | 力換算値(Y) | pulse/N | 1000000 |
| 1118 | 力換算値(Z) | pulse/N | 1000000 |
| 1119 | モーメント換算値(RX) | pulse/Nm | 1000000 |
| 1120 | モーメント換算値(RY) | pulse/Nm | 1000000 |
| 1121 | モーメント換算値(RZ) | pulse/Nm | 1000000 |
新東工業株式会社製の力センサ
新東工業株式会社製の力センサの場合、使用するセンサの定格値を下記表の換算式に代入し、算出した値を設定します。
| No. | 項目名 | 単位 | 設定値 (換算式) |
|---|---|---|---|
| 1116 | 力換算値(X) | pulse/N | 10000 / 並進力Fxの定格値(絶対値)[N] |
| 1117 | 力換算値(Y) | pulse/N | 10000 / 並進力Fyの定格値(絶対値)[N] |
| 1118 | 力換算値(Z) | pulse/N | 10000 / 並進力Fzの定格値(絶対値)[N] |
| 1119 | モーメント換算値(RX) | pulse/Nm | 10000 / モーメントMxの定格値(絶対値)[Nm] |
| 1120 | モーメント換算値(RY) | pulse/Nm | 10000 / モーメントMyの定格値(絶対値)[Nm] |
| 1121 | モーメント換算値(RZ) | pulse/Nm | 10000 / モーメントMzの定格値(絶対値)[Nm] |
力センサの定格値は"使用可能な力センサ"を参照してください。
例えば、標準モデルの力センサを使用する場合、下記のとおりとなります。
力換算値(X) = 10000 / 500 = 20 力換算値(Y) = 10000 / 500 = 20 力換算値(Z) = 10000 / 500 = 20 モーメント換算値(RX) = 10000 / 20 = 500モーメント換算値(RY) = 10000 / 20 = 500モーメント換算値(RZ) = 10000 / 20 = 500
Hypersen製の力センサ
Hypersen製の力センサの場合は、下記の値を設定してください。
| No. | 項目名 | 単位 | 設定値 |
|---|---|---|---|
| 1116 | 力換算値(X) | pulse/N | 10000 |
| 1117 | 力換算値(Y) | pulse/N | 10000 |
| 1118 | 力換算値(Z) | pulse/N | 10000 |
| 1119 | モーメント換算値(RX) | pulse/Nm | 10000 |
| 1120 | モーメント換算値(RY) | pulse/Nm | 10000 |
| 1121 | モーメント換算値(RZ) | pulse/Nm | 10000 |
取付け位置と負荷条件の設定
操作経路:基本画面 - [F2 アーム] - [F2 力制御] - [F5 センサ] - [F1 センサ設定]
詳細については、以下の表を参照ください。
取付け位置の設定
| No. | 項目名 | 単位 |
|---|---|---|
| 1034 | 取付け位置(X) | mm |
| 1035 | 取付け位置(Y) | mm |
| 1036 | 取付け位置(Z) | mm |
| 1037 | 取付け位置(RX) | deg |
| 1038 | 取付け位置(RY) | deg |
| 1039 | 取付け位置(RZ) | deg |
力センサ座標系を設定します。設定値は任意に設定します。
力センサ座標系については、以下の「力センサ座標系」を参照ください。
力センサ座標系
力センサ座標系は、力センサの検出する力、モーメントの方向を示す座標系です。
取付け位置の設定は、下図のようにTOOL"0"座標系から見た力センサの座標原点と座標軸方向を指定します。
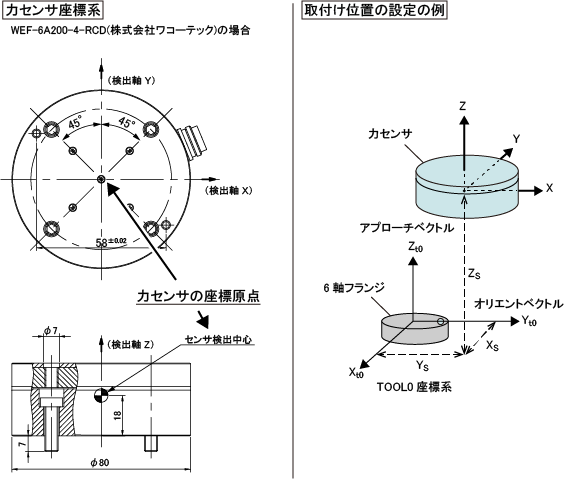
上図「取付け位置の設定の例」では、力センサの座標原点は、TOOL0座標系の(Xs,Ys,Zs)で、座標軸方向はTOOL0座標系のZ軸回りに90度回転させた方向になっているので、取付け位置の設定は(Xs,Ys,Zs,0,0,90)を入力します。
力センサの座標原点は、各力センサの外形図に記載されています。
新東工業株式会社製力センサの場合、"センサ焦点"が力センサの座標原点です。
ATI Industrial Automation製力センサの場合、"Sensing Reference Frame Origin"が力センサの座標原点です。
負荷条件の設定
| No. | 項目名 | 単位 |
|---|---|---|
| 1297 | センサ先端 負荷質量 | g |
| 1298 | センサ先端 負荷重心位置X | mm |
| 1299 | センサ先端 負荷重心位置Y | mm |
| 1300 | センサ先端 負荷重心位置Z | mm |
| 1301 | センサ先端 負荷重心イナーシャIx | kgcm² |
| 1302 | センサ先端 負荷重心イナーシャIy | kgcm² |
| 1303 | センサ先端 負荷重心イナーシャIz | kgcm² |
力センサの先についている負荷の質量や重心位置、重心イナーシャを設定します。
(例)力センサの先にハンドがついている場合は、ハンド取付けステーとハンドを合わせた質量、重心位置、イナーシャを設定します。
センサ先端 負荷重心位置については、下図を参照してください。
負荷重心位置
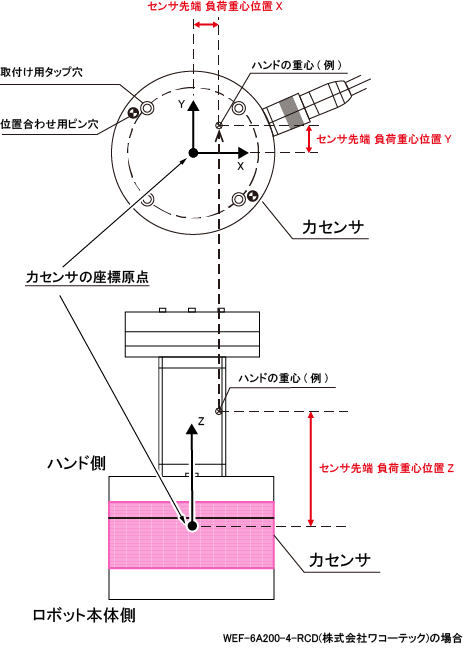
センサから先の負荷質量と重心位置は正しく設定してください。正しく設定しないと、負荷の重力補正が正しくできず、力センサを利用する力制御機能実行中にロボットが異常動作する場合があります。
センサ上限チェック機能の設定
力制御中は定格値の上限チェックを行っています。力制御以外の動作では高速に動かすため、定格値の上限チェックは行っておらず、そのままではセンサが故障する可能性があります。センサ上限チェック機能は、それを防止するための機能でユ-ザが指定した上限を超えるとエラーを出力します。下表のパラメータを設定してください。本機能はVer1.8.*から使用可能です。
| No. | 項目名 | 単位 | 説明 |
|---|---|---|---|
| 1310 | センサ力上限値 | N | センサ上限チェック機能の上限の力[N]を設定します。 |
| 1311 | センサモーメント上限値 | Nm | センサ上限チェック機能の上限のモーメント[Nm]を設定します。 |
| 1312 | センサ上限チェック | - | センサ上限チェック機能の有効/無効を設定します。 |
センサ上限チェック機能の設定をしていない場合、センサが故障する可能性がありますので必ず設定してください。
力センサとの通信設定
力センサと通信するために、ロボットコントローラの通信設定を行います。力センサとの通信方法によって設定内容が異なります。詳細は以下の内容を参照してください。
RS-422Aで通信する場合
RS-422Aで通信をする場合は、下表のパラメータを設定してください。
| No. | 項目名 | 説明 |
|---|---|---|
| 1314 | 接続方法 | センサへ接続する際の通信方法を設定します。「2:RS422」に設定します。 |
| 1316 | クライアントポート番号 | センサのクライアントポート番号を設定します。「RS-422A通信ボードの設定」の「FIFOバッファを有効にする」で選択したRS-422AのCOM番号を入力します。 |
本機能はVer2.2.*から使用可能です。
イーサネットで通信する場合
イーサネットで通信をする場合は、下表のパラメータの設定と、力センサに設定されているIPアドレスの入力を行ってください。
| No. | 項目名 | 説明 |
|---|---|---|
| 1314 | 接続方法 | センサへ接続する際の通信方法を設定します。
|
力センサに設定されているIPアドレスの入力については、こちらを参照してください。
力センサの確認
力センサ取付け後、設定した通りになっているか、「力センサ値のモニタ機能」の「センサ値」で確認してください。
誤ったIPアドレス設定で他のセンサと接続したり、取り付け位置を間違えると、誤った方向へ力制御し、ツールやワークの破壊につながるので注意してください。
力センサのリセット
力センサのリセットが必要な場合は、ティーチングペンダントまたはコマンドで行ってください。
ティーチングペンダント
センサキャリブレーションで力センサのリセットを行います。詳しい方法は「力制御のセンサ設定」を参照してください。
コマンド
ForceSensorで"0"を指定すると力センサのリセットを行います。詳しい方法はForceSensorを参照してください。
ID : 5468
- このページに関連する情報
- 力センサに設定されているIPアドレスの入力