
ID : 1138
新東工業株式会社製の力センサを使用する場合
ここでは力センサを利用する力制御機能を使用する際、新東工業株式会社製の力センサを使用する場合に必要な機器について説明します。
- このメーカの力センサは、ロボットコントローラのソフトウェアバージョンがVer.2.11.0以上で使用可能です。
使用可能な力センサ
新東工業株式会社製の力センサ「ZYXer」シリーズを利用することが可能です。
動作確認済みセンサ
| 型番 / モデル名 | 定格荷重 | 外形図 / 仕様書 | ||
|---|---|---|---|---|
| 並進力 [N] | モーメント [Nm] | |||
ZYX080A501Z |
Fx、Fy、Fz : ±500 |
Mx、My、Mz : ±20 |
詳細は新東工業株式会社のホームページを参照してください。 |
|
ZYX080A501 |
Fx、Fy、Fz : ±500 |
Mx、My、Mz : ±20 |
||
ZYX080S102 |
Fx、Fy、Fz : ±1000 |
Mx、My、Mz : ±40 |
||
ZYX100A102 |
Fx、Fy、Fz : ±1000 |
Mx、My、Mz : ±45 |
||
| ZYX100S202 | Fx、Fy、Fz : ±2000 |
Mx、My、Mz : ±100 |
||
| ZYX125A102 | Fx、Fy、Fz : ±1000 |
Mx、My、Mz : ±75 |
||
| ZYX125S202 | Fx、Fy、Fz : ±2000 |
Mx、My、Mz : ±200 |
||
| ZYX160A302 | Fx、Fy、Fz : ±3000 |
Mx、My、Mz : ±120 |
||
| ZYX160S402 | Fx、Fy、Fz : ±4000 |
Mx、My、Mz : ±320 |
||
| ZYX200A352 | Fx、Fy、Fz : ±3500 |
Mx、My、Mz : ±260 |
||
ZYX200S902 |
Fx、Fy、Fz : ±9000 |
Mx、My、Mz : ±600 |
||
共通仕様各モデルとも、ロボットコントローラとの情報のやり取りは、RS-422A通信で行います。 RS-422A通信の通信速度は、標準品では46800bpsです。力センサ購入時に92160bpsに変更することが可能ですが、ロボットコントローラは46800bpsでのみ通信可能です。したがって、通信速度を92160bpsに変更しないようご注意ください。 |
||||
上記の各力センサの情報は、すべての情報の一部です。詳細は新東工業株式会社のホームページを参照してください。
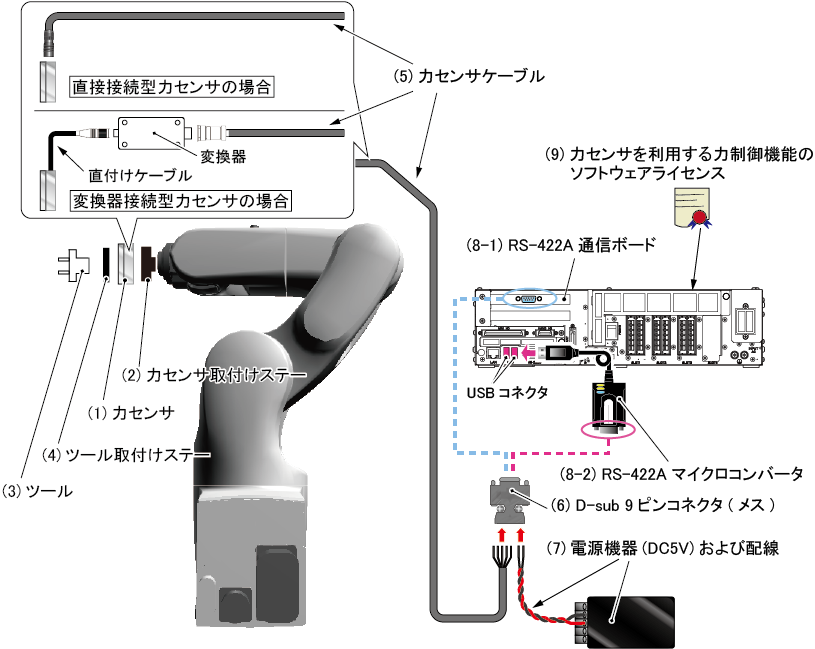
システム構成
下図にシステム構成を示します。
力センサは定期的に点検してください。
構成品/ メーカ/型式(品番) |
内容 | ||||
|---|---|---|---|---|---|
(1)力センサ新東工業株式会社
|
ご使用状況に合わせて選択してください。 |
||||
(2)力センサ取付けステーお客様で制作 |
力センサをロボット先端に取り付けるのに使用します。 詳細は「力センサの取付方法」を参照して制作してください。 |
||||
(3)ツールお客様で選定 |
お客様の仕様に合わせて選択してください。 | ||||
(4)ツール取付けステーお客様で制作 |
力センサにツールを取り付けるのに使用します。 「使用可能な力センサ」の外形図を参照し、制作してください。 |
||||
(5)力センサケーブル新東工業株式会社
|
力センサとロボットコントローラを接続するためのケーブルです。力センサを購入時に長さを指定してください。 ロボットコントローラに接続する方のケーブル端はバラ線になっています。下記に示すD-sub 9ピンコネクタ(メス)にバラ線を結線してご使用ください。 結線方法は後述の"D-sub 9ピンコネクタ(メス)への結線方法"を参照してください。 |
||||
(6)D-sub 9ピンコネクタ (メス)お客様で選定 |
力センサケーブルと下記に示す電源機器の配線を、ロボットコントローラに接続するためのコネクタです。 結線方法は後述の"D-sub 9ピンコネクタ(メス)への結線方法"を参照してください。 |
||||
(7)電源機器(DC5V)および配線お客様で選定 |
力センサに電力を供給するための電源装置とその配線です。 下記仕様のものを選定してください。
結線方法は後述の"D-sub 9ピンコネクタ(メス)への結線方法"を参照してください。 |
||||
|
力センサとロボットコントローラを、RS-422A通信で通信させるための機器を、下記の2つから選択できます。
|
|||||
(9)力センサを利用する力制御機能のソフトウェアライセンス株式会社デンソーウェーブ
|
こちらは弊社の製品です。 力センサを利用する力制御機能を使用するためのライセンスです。 "機能を有効にして出荷"は、ロボットセット出荷時にあらかじめ機能を有効にして出荷します。ロボットセットを注文する際にお申し付けください。 "ライセンスのみ"は、既にご購入済みのロボットセットにて、機能をご使用する場合にご注文ください。"ライセンスのみ"の場合は、ライセンスを登録し、お客様のロボットコントローラで機能を有効にする必要があります。 機能を有効にする手順については「機能の有効化」を参照してください。 |
||||
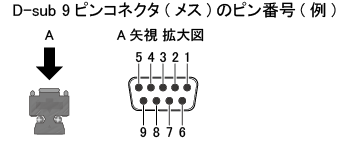
D-sub 9ピンコネクタ(メス)への結線方法
D-sub 9ピンコネクタ (メス)の各ピンに、下図のようなピン番号を割り当てて説明します。
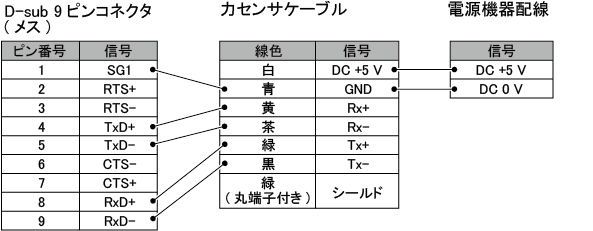
下図に結線方法(配線表)を示します。下図を参照して結線してください。
ID : 1138
- このページに関連する情報
- 力センサの取付方法
- RS-422A通信ボードの設定
- RS-422Aマイクロコンバータの使用方法