
ID : 1145
ロボットコントローラの通信設定
Netボックスとロボットコントローラがイーサネットで通信できるようにするため、ロボットコントローラの通信設定を行います。
そのためには、Netボックスに設定されているIPアドレスを知っておく必要があります。
ここでは、NetボックスのIPアドレスが、工場出荷直後の値 (192.168.1.1)であることを前提に説明します。
1
ロボットコントローラの設定は、ロボットコントローラとNetボックスがイーサネットケーブルを介して接続されていない状態で行います。接続されている場合は、一旦外し、ロボットコントローラの設定が終了後に接続してください。
2
ティーチングペンダントでロボットコントローラの通信設定を行います。
-
下記の操作を行います。
操作経路:基本画面 - [F6 設定] - [F5 通信と起動権] - [F2 ネットワークと通信権]
-
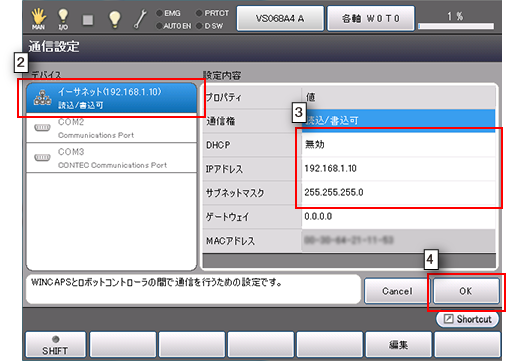
[通信設定]ウィンドウが表示されるので、"イーサネット"を選択します。
-
下表のとおりに設定します。
(下表以外の項目は変更不要です。)
DHCP 無効 IPアドレス 192.168.1.10 サブネットマスク 255.255.255.0 -
[通信設定]ウィンドウの[OK]ボタンを押します。
上記の設定値は一つの例です。ご使用の環境では不都合が生じる場合、Netボックスと通信可能な別の値を設定してください。
3
設定は終了です。
ロボットコントローラとNetボックスをイーサネットケーブルを介して接続した後、力センサを利用する力制御機能の設定を行います。機能の設定については、"パラメータの設定"を参照してください。
ID : 1145