
ID : 1135
Netボックスのパラメータ設定と通信設定
Netボックスには、力センサの機能に関するパラメータが格納されています。
力センサを利用する力制御機能を実行する前に、あらかじめ、そのパラメータを設定しておく必要があります。
また、イーサネットで通信するため、IPアドレスの設定が必要です。
Netボックスのパラメータおよび通信設定の編集は、コンピュータで行います。
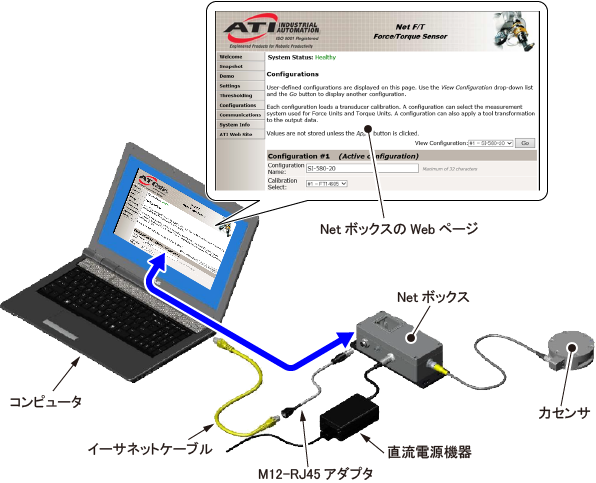
コンピュータからイーサネット通信でNetボックスにアクセスすると、コンピュータにはNetボックスが生成するWebページが表示されます。そのページでパラメータを編集します。
下図は、パラメータ編集時のシステム例です。Netボックスへの電源供給にPoEイーサネットスイッチングHUBを使用する場合は、直流電源機器は不要です。
下記の手順で設定を行います。
|
項目 (リンク先) |
手順内容 (リンク先) |
|---|---|
| 1. コンピュータのイーサネット接続設定 |
Netボックスとコンピュータがイーサネットで通信できるようにするため、コンピュータのイーサネット接続設定を行います。 詳細は、コンピュータのイーサネット接続設定を参照してください。 |
| 2. パラメータ設定と通信設定 |
コンピュータのWebブラウザからNetボックスにアクセスして、パラメータ設定と通信設定を行います。 詳細は、パラメータ設定と通信設定を参照してください。 |
| 3. ロボットコントローラの通信設定 |
ロボットコントローラとNetボックスがイーサネットで通信できるようにするため、ロボットコントローラの通信設定を行います。 詳細は、ロボットコントローラの通信設定を参照してください。 |
ID : 1135
- このページに関連する情報
- コンピュータのイーサネット接続設定
- パラメータ設定と通信設定
- ロボットコントローラの通信設定