
ID : 1133
ATI Industrial Automation製力センサ使用時のハードウェアの準備
ここでは力センサを利用する力制御機能を使用する際、ATI Industrial Automation製の力センサを使用する場合に必要な機器について説明します。
- このメーカの力センサは、ロボットコントローラのソフトウェアバージョンがVer.2.11.0以上で使用可能です。
- 協調機能を使用する場合、このメーカの力センサは使用できません。
使用可能な力センサ
ATI Industrial Automation製の力センサの中で下表の製品が使用できます。
型式 |
定格荷重 |
|||
|---|---|---|---|---|
Fx、Fy [N] |
Fz [N] |
Tx、Ty [Nm] |
||
Axia80-M8 |
(*1) |
±150 |
±470 |
±8 |
Axia80-M20 |
±500 |
±900 |
±20 |
|
Axia80-M50 |
±1200 |
±2000 |
±50 |
|
Nano17 Titanium |
(*2) |
±32 |
±56.4 |
±200 |
Nano17 |
±50 |
±70 |
±500 |
|
Nano17 IP65/IP68 |
||||
Nano25 |
±250 |
±1000 |
±6 |
|
Nano25 IP65/IP68 |
||||
Nano43 |
±36 |
±36 |
±500 |
|
Mini27 Titanium |
±80 |
±160 |
±4 |
|
Mini40 |
±240 |
|||
Mini40 IP65/IP68 |
||||
Mini45 Titanium |
±240 |
±480 |
±12 |
|
Mini45 |
±580 |
±1160 |
±20 |
|
Mini45 IP65/IP68 |
||||
Mini58 |
±2800 |
±6800 |
±120 |
|
Mini58 IP60 |
||||
Mini58 IP65/IP68 |
||||
Mini85 |
±1900 |
±3800 |
±80 |
|
Gamma |
±130 |
±400 |
±10 |
|
Gamma IP60 |
||||
Gamma IP65 |
||||
Gamma IP68 |
||||
Delta |
±660 |
±1980 |
±60 |
|
Delta IP60 |
||||
Delta IP65 |
||||
Delta IP68 |
||||
Theta |
±2500 |
±6250 |
±400 |
|
Theta IP60 |
||||
Theta IP65/IP68 |
||||
Omega85 |
±1900 |
±3800 |
±80 |
|
Omega85 IP65/IP68 |
||||
Omega160 |
±2500 |
±6250 |
±400 |
|
Omega160 IP60 |
||||
Omega160 IP65/IP68 |
||||
Omega191 |
±7200 |
±18000 |
±1400 |
|
Omega191 IP60 |
||||
Omega191 IP65/IP68 |
||||
Omega250 IP60 |
±16000 |
±32000 |
±2000 |
|
Omega250 IP65/IP68 |
||||
Omega331 |
±40 |
±88 |
±6 |
|
|
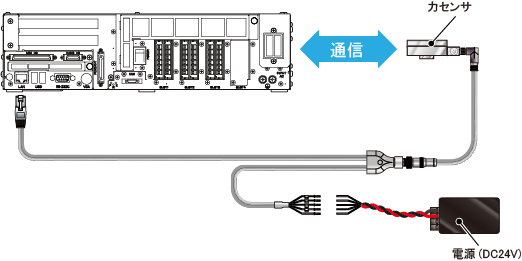
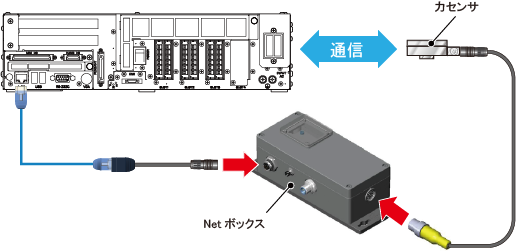
*1, *2 : ロボットコントローラと力センサの接続方法には2種類あります。Netボックスという通信インターフェースを使用する方法と使用しない方法です。上記表で(*1)と表記している型式の力センサはNetボックスを使用しません (以降、"直接接続型力センサ"と呼びます)。(*2)と表記している型式の力センサはNetボックスを使用します (以降、"Netボックス接続型力センサ"と呼びます)。
|
||||
上記の各力センサの情報は、すべての情報の一部です。外形寸法や環境条件などの上記以外の情報については、力センサを購入する際に同梱される取扱説明書または、ATI Industrial Automationのホームページに掲載されている取扱説明書を参照してください。
ハードウェアの準備
直接接続型力センサとNetボックス接続型力センサでは、準備するハードウェアが異なります。
詳細は下記リンク先を参照してください。
| 力センサ |
システム構成 (リンク先) |
|---|---|
| 直接接続型力センサ | 直接接続型力センサ使用時のハードウェアの準備 |
| Netボックス接続型力センサ |
ID : 1133
- このページに関連する情報
- 直接接続型力センサ使用時のハードウェアの準備
- Netボックス接続型力センサ使用時のハードウェアの準備