
ID : 1134
力センサ取付ステーの説明
力センサをロボットのフランジに取付けるためには、専用のステー(力センサ取付ステー)をお客様で制作していただく必要があります。ここでは、力センサ取付ステーについて、下記項目に分けて説明します。
力センサ取付ステーの構造
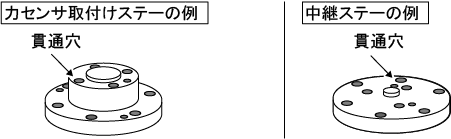
力センサ取付ステーの例を下図に示します。
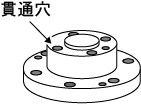
力センサ取付ステーには、上図のように複数の貫通穴を設け、ボルトや位置決めピンを挿入できるようにします。
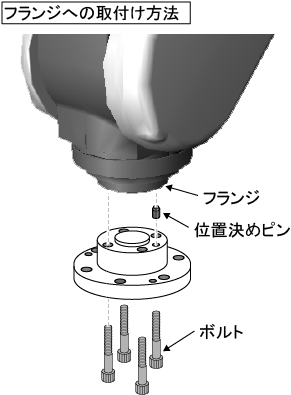
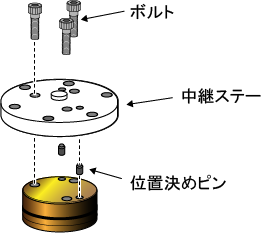
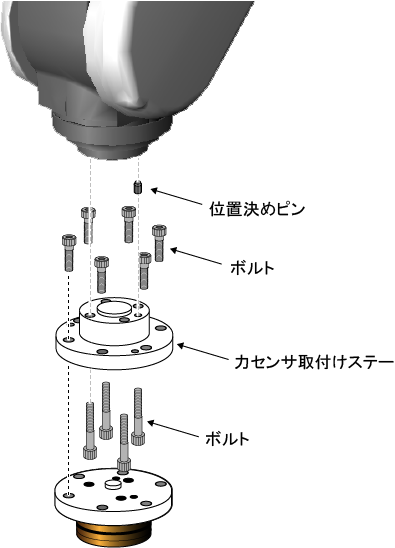
力センサ取付ステーをロボットのフランジに取付けるには、下図のように位置決めピンとボルトを使用して取付けます。
(位置決めピンとボルトは、お客様でご用意いただくものです。)
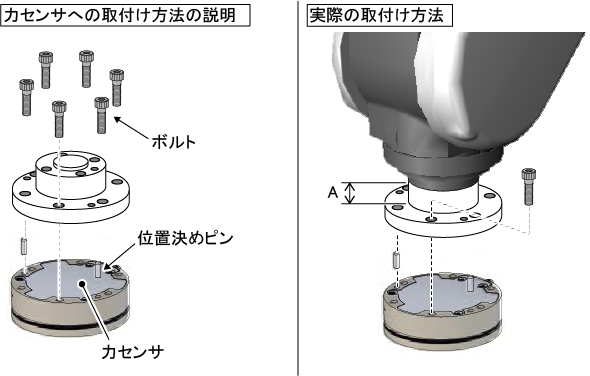
力センサ取付ステーを力センサに取付けるには、左下の図のように位置決めピンとボルトを使用して取付けます。
実際には、力センサ取付ステーをロボットのフランジに取付けた後に力センサを取付けます。したがって、右下の図のAの寸法は、ボルトの締め付け作業ができる高さにする必要があります。
力センサ取付ステー設計時の要点
-
フランジ面の穴の寸法とツール/ステー/力センサなどの総質量
-
フランジ面のねじ穴や位置決めピンの穴の位置及び寸法は、使用するロボットの外形寸法図に記載しています。
また、ステーや力センサおよびツールなどのフランジに負荷をかける機器 (以降 "ツール関連部分")の総質量とその重心位置は、使用するロボットによって上限が異なります。
詳細は下表のリンク先を参照してください。
ロボットシリーズ名 外形寸法図 / ツール関連部分の注意事項
(リンク先)
6軸 VM VS VS-6556/6577 VP 4軸 HM (HMSを含む) HS (HSSを含む) HSA1 HSR XR 力センサの穴の寸法
-
力センサのねじ穴や位置決めピンの穴の位置及び寸法については、使用する力センサの外形寸法図を参考にしてください。
フランジと力センサのねじ穴の位置が近い場合
-
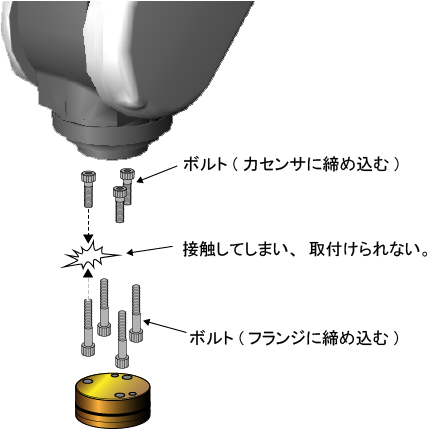
フランジと力センサのねじ穴の位置が近い場合(例 : フランジのねじ穴のピッチ円直径(以降 "P.C.D.")と力センサのねじ穴のP.C.D.が非常に近い場合)、下図のようにボルト同士が干渉してしまい、通常のステーでは取り付けられません。この場合は中継ステーを追加で取付けます。
-
下図は力センサ取付けステーと中継ステーの例です。
-
まず、中継ステーを力センサに取付けます。
-
次に力センサ取り付けステーをフランジに取付け、その後、力センサ付きの中継ステーを力センサ取り付けステーに取付けます。
-
力センサ取付けセンサーと中継ステーの各穴の位置を、お互いに干渉しない位置となるように設計することで、上記のように取り付けることができます。
ID : 1134