
ID : 7271
机械臂的手动操作
可以利用远程TP/虚拟TP的键操作使机械臂移动。
按照以下步骤移动机械臂。
操作步骤
手动操作机器人前请务必确认以下项目。
- 机器人的安装情况正常。
- 机器人的动作范围内没有人员。
1
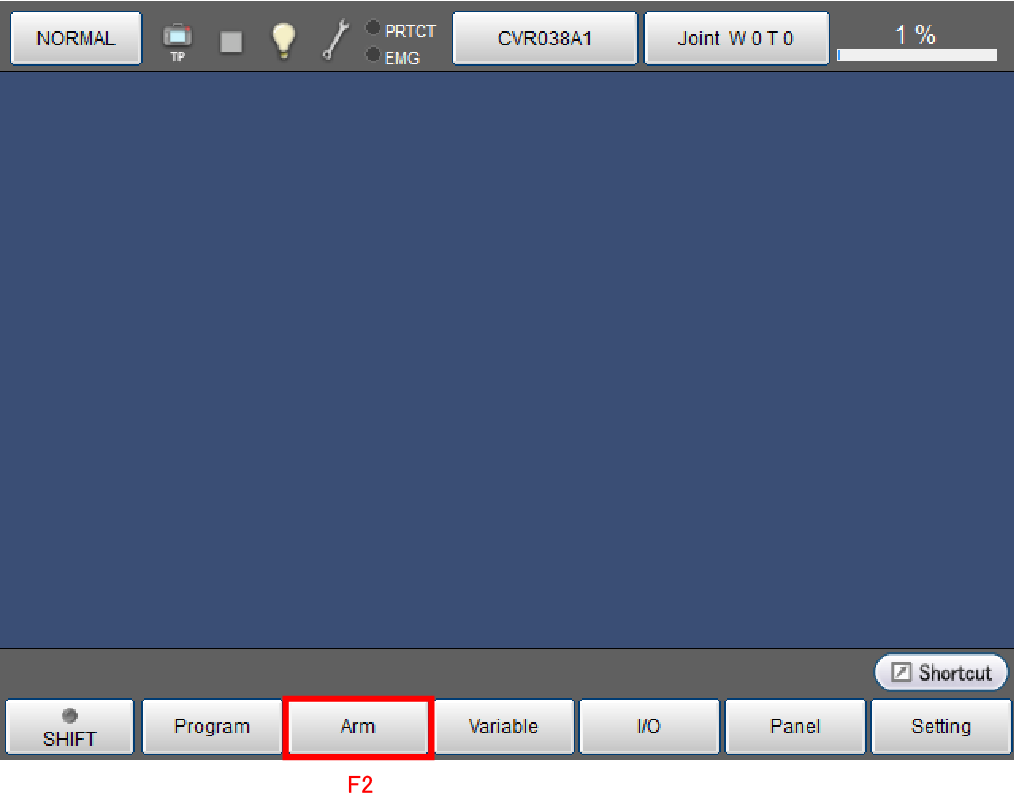
在初始画面上按下[F2 机械臂]。
不在画面中显示当前位置也可进行机器人各机械臂的操作。
2
手动操作的动作模式下,初始值变成“各轴模式”。要设成其他动作模式时,切换动作模式。操作方法请参照“手动操作时的模式变更”。
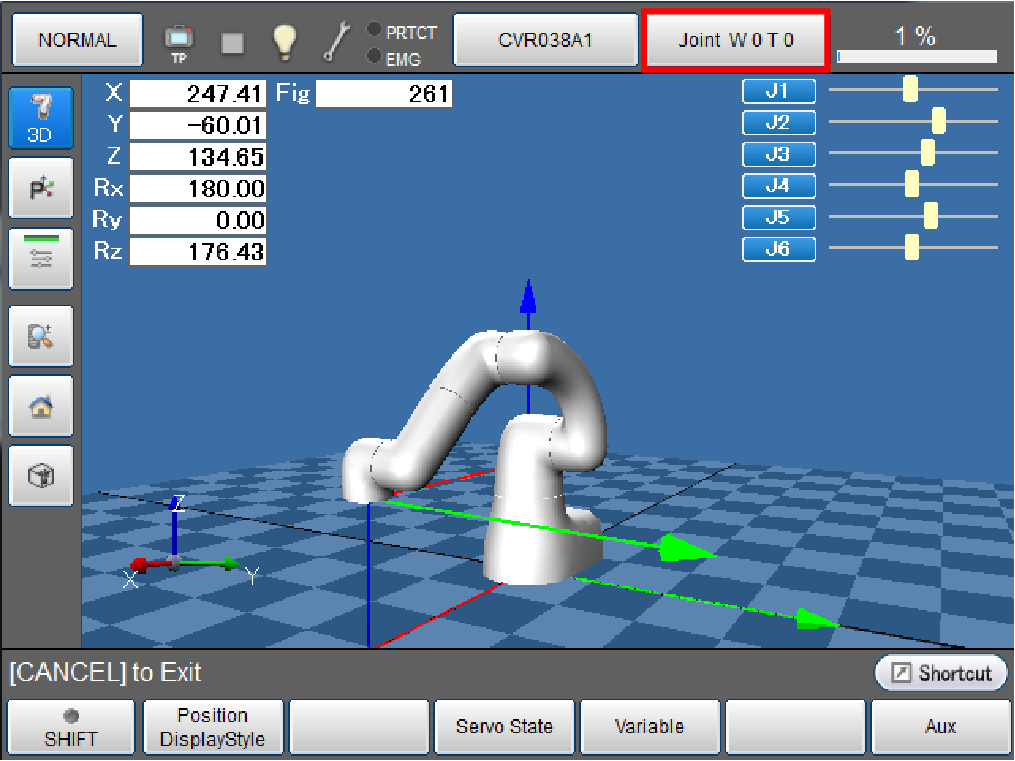
3
设定速度、加速度。
在初始值中,速度变成1%。
操作方法请参照“外部速度的设定”。
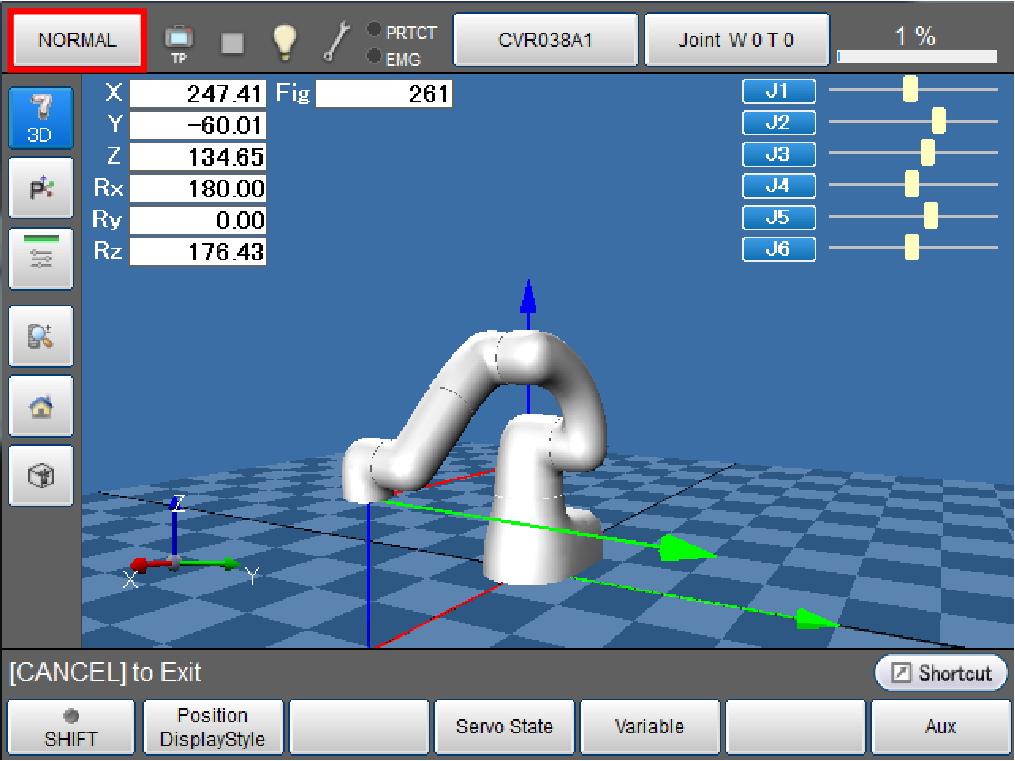
4
确认已处于普通模式。
变成直接模式或直接准备模式时,不可通过键操作使机器人动作。请切换到常规模式。关于模式的切换方法,请参照“动作模式的切换方法”。
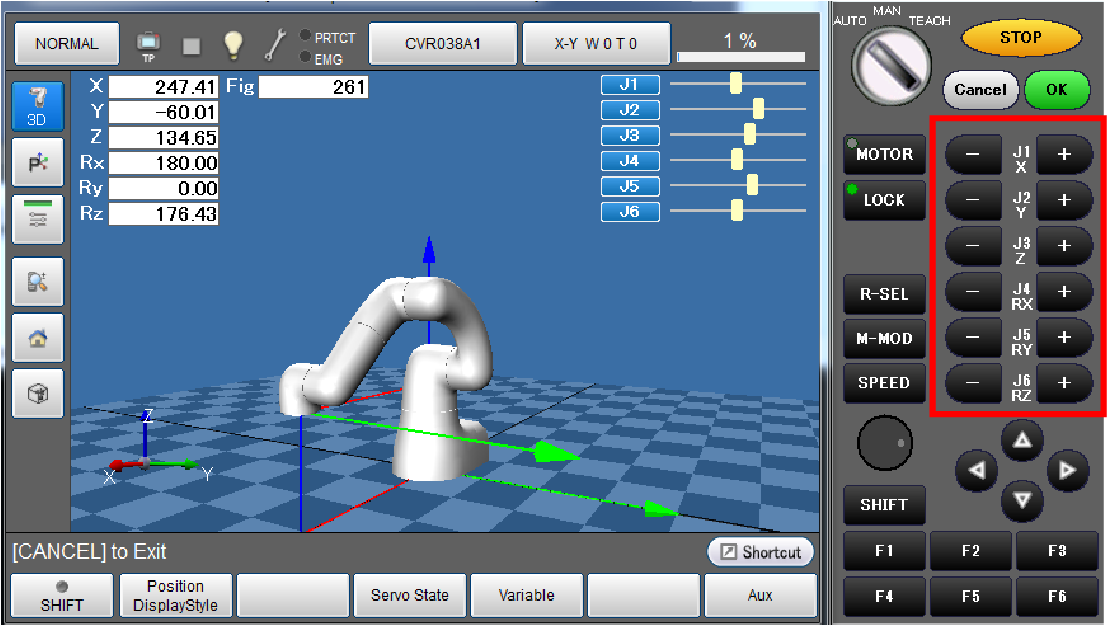
5
执行该操作后机器人动作。操作人员请离开机器人的动作范围。
虚拟TP:按压键盘上的Shift键+移动方向键(“+”“-”),电机电源变为ON,机械臂动作。
远程TP:按压动作许可按钮+移动方向键(“+”“-”)后,电机电源变成ON,机械臂动作。
如果停止按压移动方向键,机械臂动作停止。
画面上的当前位置显示根据机械臂的移动变化。
每个动作模式的移动方向键的作用都不同。详细内容请参照“基本画面和图标”。
下图的画面是在X-Y模式下操作的例子。
ID : 7271