手动操作的模式变更
利用远程TP/虚拟TP的键操作使机械臂移动的动作中包括“各轴模式”、“X-Y模式”、“TOOL模式3种模式。
各模式的详细内容请参照功能指南的“手动操作”。
按照以下步骤切换模式。
动作模式的切换步骤
运行开始时,请将速度设定在20%以下进行操作。如果开始就高速运行,则机器人可能与周围的设备发生碰撞。
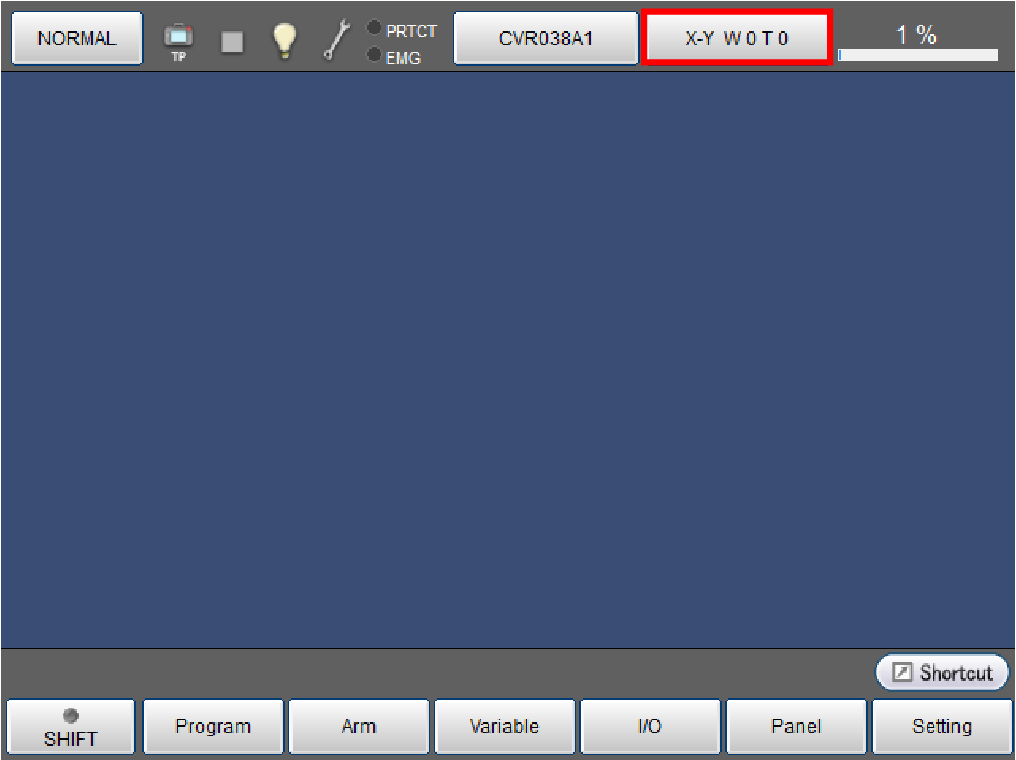
1
按下状态栏的模式显示部分。
将显示下一步骤所示的[运行模式选择]视窗。
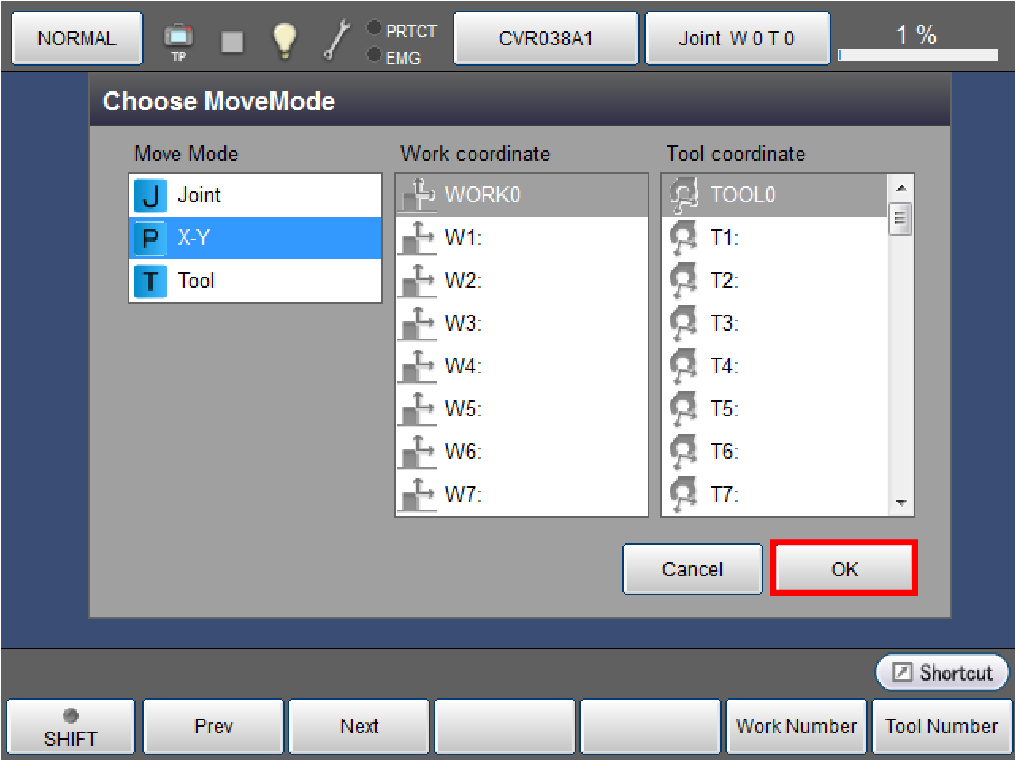
2
使用光标键、或者直接触摸画面选择模式,按压[OK]。
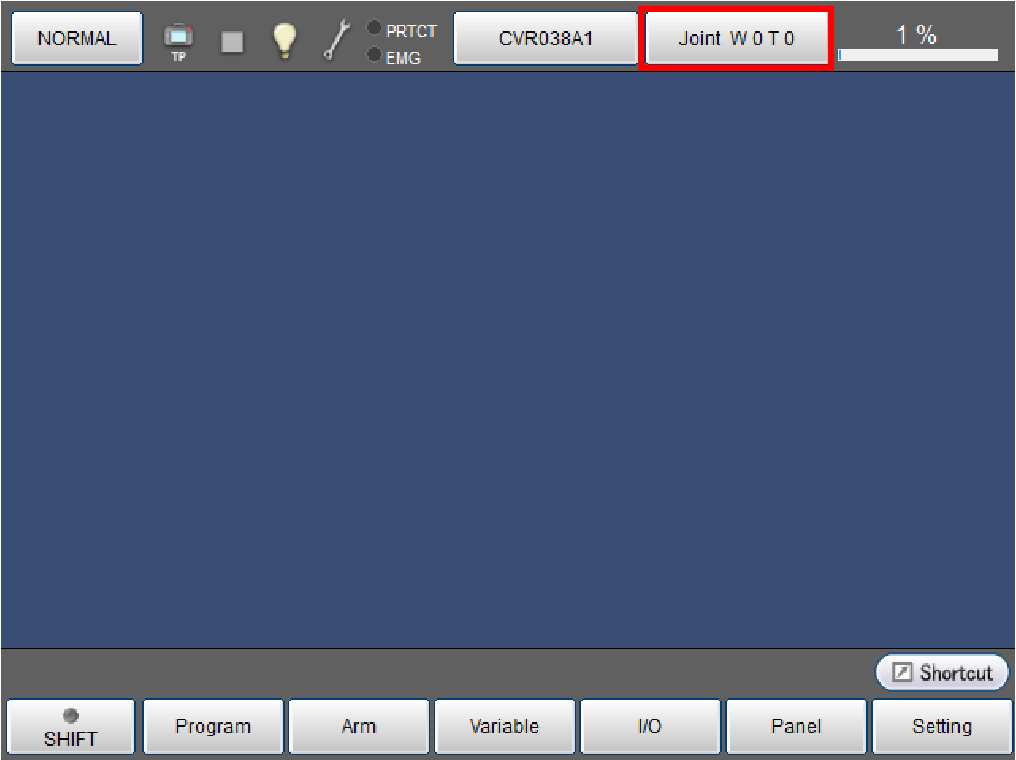
3
在状态栏的模式显示部分显示选择的动作模式。