
ID : 4030
画面说明
远程TP/虚拟TP的指令
如果使用远程TP/虚拟TP的键、按钮、以及开关,则在液晶画面上可以显示各种画面。
各个画面也都具有独自的指令菜单。在指令菜单中,按压功能键选择指令。
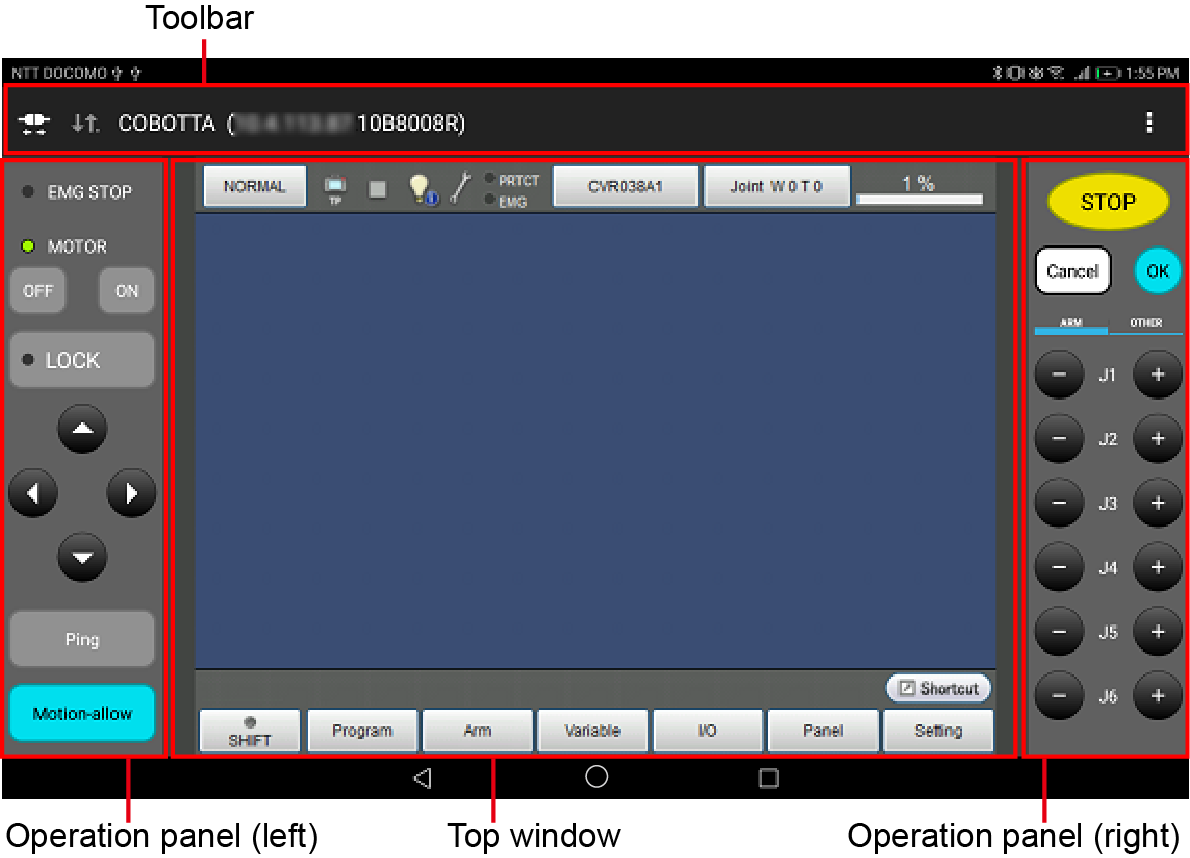
各部位的名称
- 远程TP
- 虚拟TP
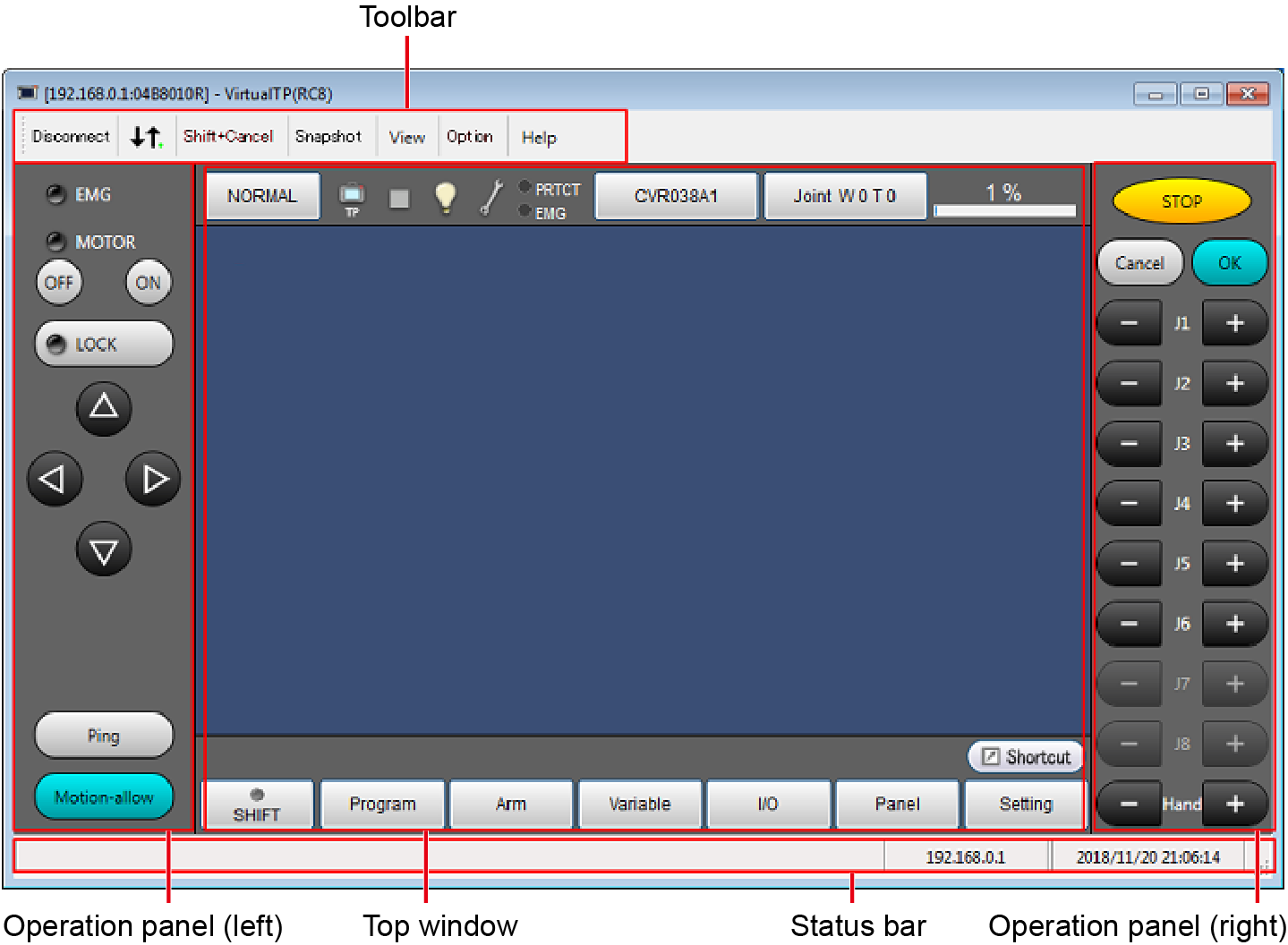
工具栏
- 远程TP

- 虚拟TP

| № | 名称 | 说明 |
|---|---|---|
| (1) | 切断按钮 | 切断与COBOTTA的通信。 |
| (2) | 连接状态显示 | 显示通信状态。 连接中图标右下方的指示灯闪烁。 |
| (3) | 连接位置信息 | 远程TP上显示注册的连接位置的名称。 括号内表示连接位置的IP地址和序列No.。 |
| (4) | 菜单 | 显示使用条款、版本信息、著作权信息、MAC地址。 |
| (5) | Shift+Cancel键 | 执行“Shift + Cancel”。 |
| (6) | 快拍按钮 | 保存为指定显示的基本画面的格式。 |
| (7) | 显示按钮 | 变更基本画面的大小。 |
| (8) | 选项按钮 | 连接时超时和自动切断设定。 |
| (9) | 帮助按钮 | 显示虚拟TP的用户指南和应用程序版本。 |
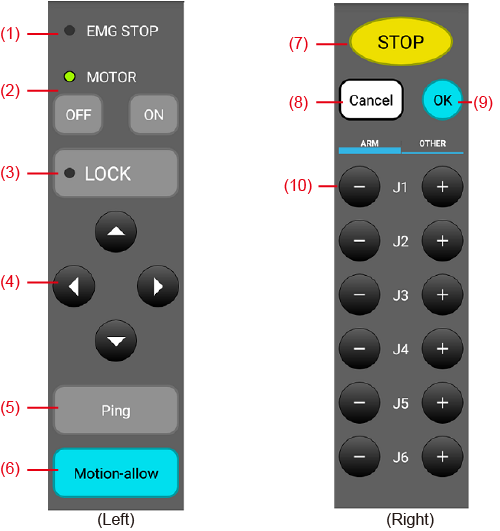
操作面板
- 远程TP
- 虚拟TP
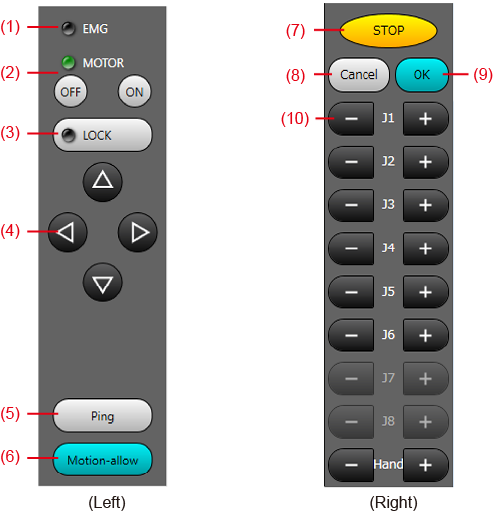
| № | 名称 | 说明 |
|---|---|---|
| (1) | 紧急停止状态显示 | 显示紧急停止状态。紧急停止时指示灯亮灯。 |
| (2) | 电机按钮 | 可ON/OFF电机。 电机ON时指示灯亮灯。 |
| (3) | 锁定按钮 | 可ON/OFF机器锁定。 机器锁定ON时指示灯亮灯。 |
| (4) | 箭头按钮 | 可移动基本画面的光标。 |
| (5) | 连接确认按钮 | 确认正在连接的COBOTTA。 按下按钮,则COBOTTA的LED亮绿灯。 |
| (6) | 动作许可按钮 | 变量移动等使机器人动作时需要按下此按钮。 |
| (7) | Stop按钮 | 执行“Stop”。 |
| (8) | Cancel键 | 执行“Cancle”。 |
| (9) | OK按钮 | 执行“OK”。 变量移动等使机器人动作时需要按下动作许可按钮(不支持触摸面板的电脑则按下Shift键)。 |
| (10) | 各轴操作按钮 | 使对应的轴动作。 需要按下动作许可按钮(不支持触摸面板的电脑则按下Shift键)。 |
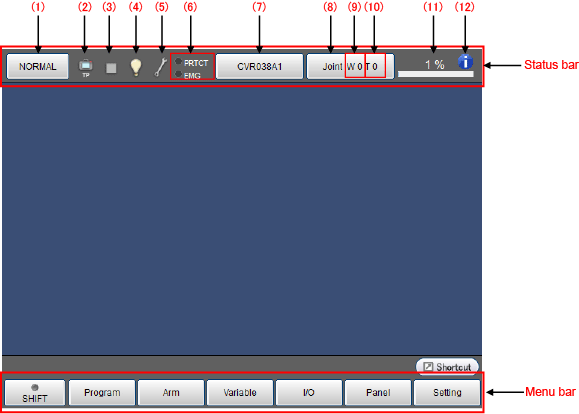
状态栏
显示连接位置的COBOTTA的IP地址、注释、当前时刻。
仅虚拟TP有显示领域。
基本画面
显示基本画面。指令菜单内的指令,可以从该基本画面依次前行。
基本画面上远程TP和虚拟TP相同。
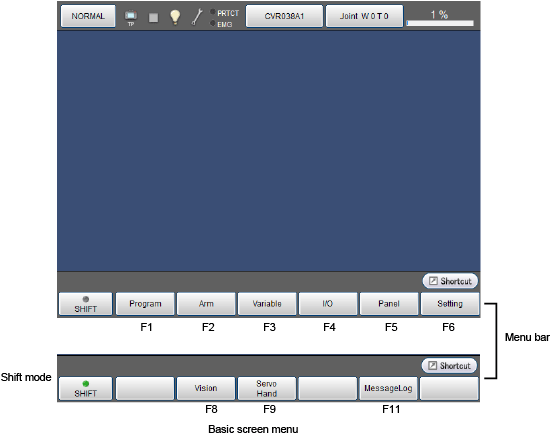
最初接通COBOTTA的电源时会显示语言选择画面。
设定方法请参照“接通COBOTTA的电源”。
图标
关于基本画面状态栏中显示的图标,请参照下表。
| № | 名称 | 说明 | |
|---|---|---|---|
| (1) | 动作模式 | 普通模式 | |
| 直接准备模式、直接模式 | |||
| (2) | 启动权 |  |
TP |
 |
I/O | ||
 |
Ethernet | ||
| (3) | 程序执行状态 |  |
程序停止中 |
 |
程序执行中 | ||
 |
特权任务执行中 | ||
 |
程序和特权任务执行中 | ||
 |
讯息输出(执行PrintMsg指令时显示) | ||
| 特异点附近 | |||
| (4) | I/O状态、机械臂状态 |
 |
虚拟输入未使用且I/O锁定未设定 (注)I/O锁定:限制与外部机器的I/O通信 |
 |
虚拟输入使用中或I/O锁定状态 | ||
 |
虚拟栅栏或者排他功能有效。 |
||
| (5) | 系统状态 |  |
系统正常状态 |
系统异常状态 ・电池警告 ・编码器系统故障 ・严重错误(发生等级5的错误时) |
|||
| (6) | 开关输入状态 | EMG | 紧急停止状态 |
| PROTECT | 防护停止状态 | ||
| (7) | 机器人选择按钮 |
|
机器人类型的选择和显示 |
| (8) | 手动操作时 动作模式 |
|
显示手动操作时的动作模式(“各轴”、“X-Y”、“TOOL”)。 |
| (9) | 工件坐标 |
|
显示所选择的工件编号 |
| (10) | 工具坐标 |
|
显示所选择的工具编号 |
| (11) | 速度按钮 |
|
外部速度的设定和显示 |
| (12) | 微动模式 |  |
微动作时 |
ID : 4030