
ID : 7306
衝突検出時のエラー発生有無の設定
リモートTP/バーチャルTPまたはコマンドを使用して、衝突検出時のエラー発生有無を設定します。コマンドの詳細については、"SetCollisionDetection" を参照ください。
エラー発生を[しない]に設定した場合、衝突を検出してもエラーを出力せず、ロボットは停止しません。PLCなどの外部機器からロボットを制御し、ロボットが衝突を検出したときも外部機器からの制御で停止させたい場合は、エラー発生を[しない]に設定してください。衝突検出の状態は、"GetCollisionStatus" を使用して取得できます。
設定手順
リモートTP/バーチャルTP操作による設定手順を示します。
1
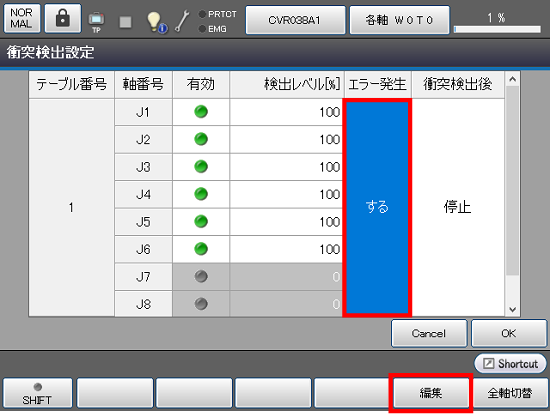
衝突検出設定画面でエラー発生の項目を選択し、[F5 編集]を押します。
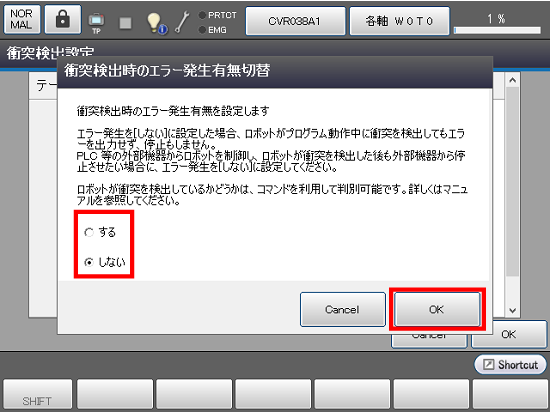
"衝突検出時のエラー発生有無切替画面" が表示されますので、[する]または[しない]を選択し、[OK]を押します。
[Cancel]を押すと、設定は変更されません。
2
設定が変更されていることを確認し、[OK]を押します。
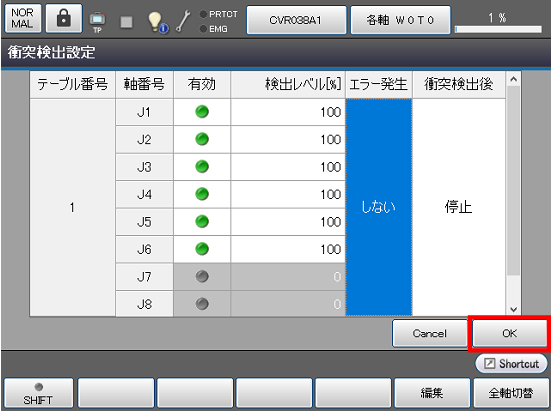
設定が保存されます。
ID : 7306