
ID : 2665
衝突検出時の軸フリー設定
リモートTP/バーチャルTPまたはコマンドを使用して、衝突検出時に動作軌道上で停止するか軸フリー状態にしてから停止するかを設定します。コマンドの詳細については、"SetCollisionDetection" を参照ください。
衝突による被害の軽減や挟みこみの防止に効果があります。
この設定は、Ver.2.9.*から使用可能です。
- 軸フリー
- 軸を柔らかくし、外力によってロボットの姿勢が変更される状態です。
注意事項
- 衝突時の動作速度や先端負荷質量の設定によっては、衝突後にCOBOTTAが動き続ける恐れがあります。また、速度設定に関係なくそれ以上の速度で姿勢変更する恐れがあります。
-
衝突検出時の姿勢によっては、軸フリーによる姿勢変更が小さい場合があります。その場合は、姿勢変更が大きい場合に比べて、衝突物を退避させづらくなる恐れがあります。
- 電動バキューム使用時に衝突検出した場合、軸フリー状態の終了と同時に電動バキュームのモータがOFFになります。ワークを吸着している際にモータがOFFされるとワークが落下しますので、ご注意ください。
機能説明
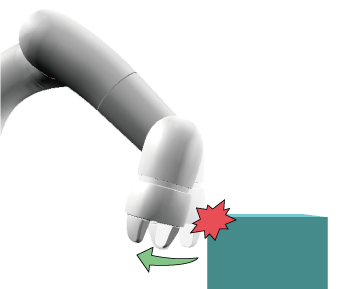
軸フリーに設定した場合、COBOTTAは衝突検出時に全軸が軸フリー状態になります。軸フリー状態になると、衝突時の衝撃によりCOBOTTAの姿勢が変更されます。
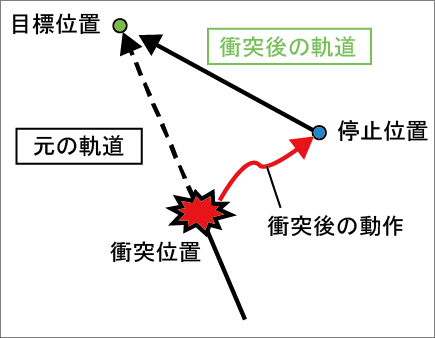
その後、下記の条件のうち1つでも満たすと軸フリーを解除してコンティニュ停止します。
- COBOTTAの動作が停止する。
- 衝突検出から1秒経過する。
- 衝突位置からいずれかの軸が10°以上動作する。
コンティニュ停止後、プログラムを起動するとCOBOTTAは停止位置から実行していた軌道の目標位置へ動作します。
ただし、下記の条件の場合はエラーが発生し、コンティニュスタートできません。
| 条件 | エラー | |
|---|---|---|
| エラーコード | 内容 | |
検出位置から "位置ずれ検出アーム許容範囲" を超えて動いた場合 (工場出荷時は全軸10°) 位置ずれ検出アーム許容範囲の設定は、"使用条件の表示・設定" で確認できます。 |
0x83201412 | 停止位置と動作開始位置が異なります。 |
| Move C、Move S、Rotateコマンドの実行中に衝突を検出した場合 | 0x84201578 | 円弧またはスプライン動作中に衝突検出しました。 |
この設定は、下記のどちらかの状態で有効になります。
- PacScriptを起動している状態
- 外部機器からロボットの制御権を取得した状態
上記以外の場合には、軸フリーに設定していても動作軌道上で停止します。例えば、変数画面から変数移動する場合に衝突しても軸フリーになりません。
PacScriptを起動している状態でも特権タスクとして実行している場合は、軸フリーにはなりません。
設定手順
リモートTP/バーチャルTP操作による設定手順を示します。
1
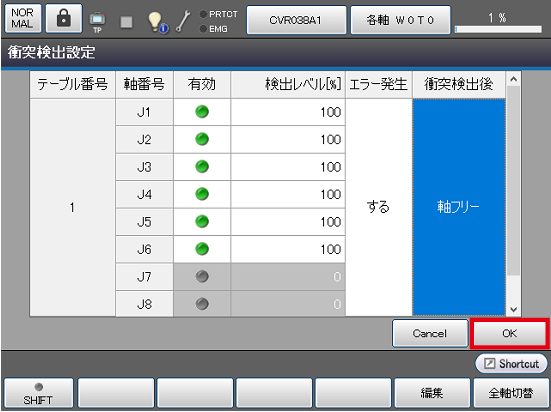
衝突検出設定画面で衝突検出後の項目を選択し、[F5 編集]を押します。
エラー発生を[しない]に設定している場合、衝突検出後の項目は選択することができません。

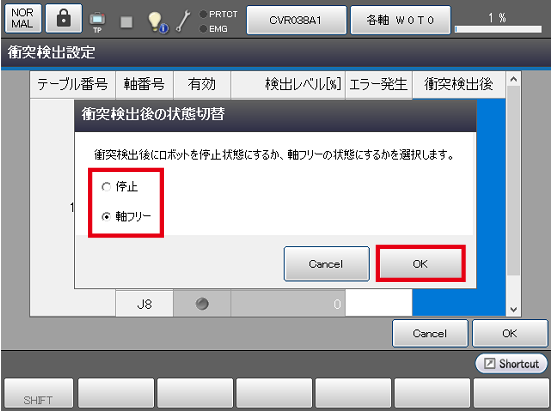
2
"衝突検出後の状態切替画面" が表示されますので、[停止]または[軸フリー]を選択し、[OK]を押します。
[Cancel]を押すと、設定は変更されません。
3
設定が変更されていることを確認し、[OK]を押します。
軸フリーに設定の場合、[OK]を押すとシステムメッセージが表示されます。
内容を確認し、[OK]を押してください。
設定が保存されます。
電動バキュームを使用している場合は、下記のシステムメッセージが表示されます。
リモートTP/バーチャルTPの電球アイコンを押すと現在の設定が確認できます。
ID : 2665