
ID : 7279
ロボットプログラムによる方法
ロボットプログラムで診断動作を行う場合、PacScriptコマンドの "DiagnosisMove" を使用します。その他にも、診断動作に関連するPacScriptコマンドがあります。
ここでは、上記内容を、下記項目に分けて説明します。
診断動作中は、意図しない動作をする恐れがあります。ロボットの可動範囲内に入らないようにしてください。
DiagnosisMoveの動作内容
"DiagnosisMove" を実行すると、COBOTTAは各軸の動作角度が診断動作角度以上になるように動作します。具体的な目標位置は、TPアプリにて確認できます。
- 診断動作中はロボットが微小動作とモータON/OFFを繰り返します。
モータがON/OFFを切り替える際にブレーキ解除音が発生しますが、異常ではありません。診断完了まで待機してください。 - "DiagnosisMove"は特権タスクでのみ実行できます。"DiagnosisMove"の詳細についてはこちらを参照してください。
TPアプリで下記経路で操作すると、[診断] ウィンドウが表示されます。
|
操作経路 : [F6 設定] – [F10 COBOTTA] – [F2 診断] |
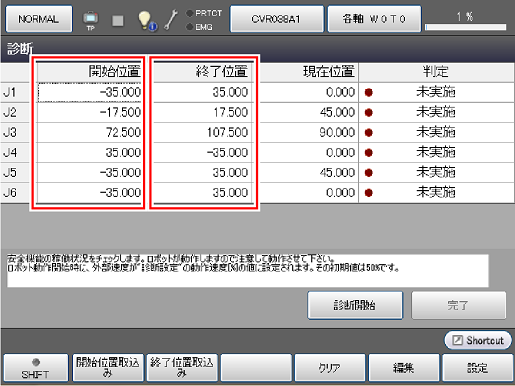
"DiagnosisMove" を実行すると、[診断] ウィンドウの "開始位置" に設定されている位置 (角度) へ移動し、その後、[診断] ウィンドウの "終了位置" に設定されている位置 (角度) へ移動します。そのときの外部速度は、診断動作開始時に、診断設定の "動作速度[%]" で設定した値に自動的に設定されます。診断設定の "動作速度[%]" の初期値は50%です。
"開始位置" や "終了位置" および、動作速度は変更することができます。変更方法は、 "TPアプリによる方法"の"設定項目の説明" を参照してください。
用例
"DiagnosisMove" の用例を下記に示します。下記の用例では、特権タスクにて、"DiagnosisMove" を実行後、診断動作の結果によって、表示するメッセージを変えています。診断動作の結果の判定には "GetDiagnosisWarning" を使用しています。
Sub Main
'診断動作を実施
DiagnosisMove
'=== 診断動作の結果によってメッセージを変える ===
'診断動作が正常に終了した場合
If GetDiagnosisWarning = 0 Then
Msgbox "COBOTTAの位置検出機能および速度検出機能は正常です。"
'診断動作に異常があった場合
Else
Msgbox "COBOTTAの位置検出機能または速度検出機能に異常があります。"
End if
'================================================
End Sub- "DiagnosisMove" コマンドは、診断動作の実施状況 (全軸分) を"未実施"にしてから診断動作を実行します。
- シミュレーションでの実行時は、何も実行せずに次の行に移ります。
診断動作用コマンド一覧
診断動作用コマンドには、"DiagnosisMove" の他に、用例で使用した "GetDiagnosisWarning" などもあります。
診断動作用のコマンド一覧を下記に示します。
| コマンド (参照先) |
機能 |
|---|---|
| DiagnosisMove |
診断動作を実行します。 |
| ClearDiagnosisState |
診断動作の実施状況を、 "未実施" にします (全軸分)。 |
| GetDiagnosisPosition |
診断動作の開始位置または、終了位置を取得します。 |
| GetDiagnosisState |
診断動作の実施状況 (全軸分) を、取得します。 |
| GetDiagnosisWarning |
診断動作の実施状況が "未実施" となっている軸の、有無を取得します。 |
ID : 7279