
ID : 7277
TPアプリによる方法
TPアプリでは、診断動作の実施と、診断動作角度などの各種設定項目の編集が行えます。
ここでは、上記内容を下記項目に分けて説明しています。
診断動作中は、意図しない動作をする恐れがあります。ロボットの可動範囲内に⼊らないようにしてください。
診断動作の実施方法
1
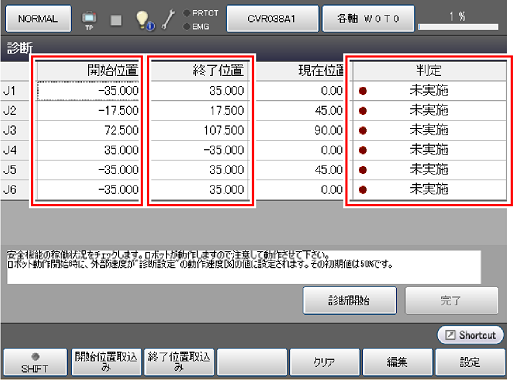
下記経路で操作すると、[診断] ウィンドウが表示されます。
|
操作経路 : [F6 設定] – [F10 COBOTTA] – [F2 診断] |
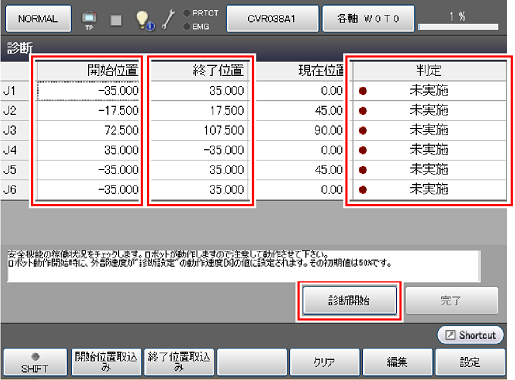
"開始位置" と "終了位置" は、動作角度が診断動作角度以上となるような位置が設定されています。"開始位置" と "終了位置" は変更することができます。変更方法は、後述の "設定項目の説明" を参照してください。
"判定" には、最初 "未実施" が表示されています。
2
[診断開始] ボタンを押します。下図のような操作方法を説明するウィンドウが表示されます。
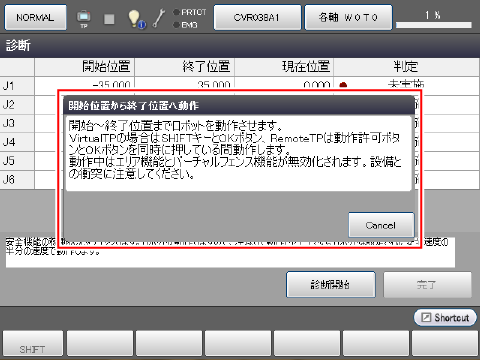
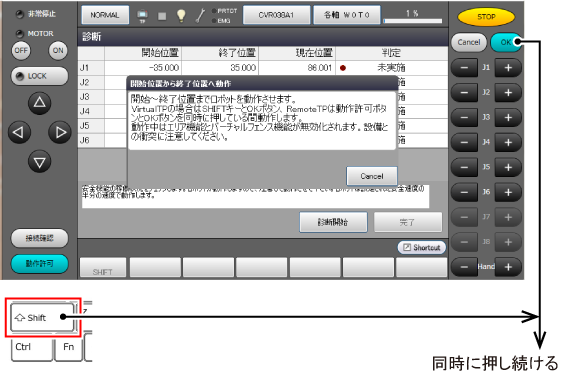
操作方法を説明するウィンドウが表示されている状態で、あるボタンを押すと、診断動作が始まります。押すボタンは、バーチャルTPとRemote TPとで異なります。下図を参照してください。なお、押すボタンについては、操作方法を説明するウィンドウにも記載してあります。
診断動作中はロボットが微小動作とモータON/OFFを繰り返します。
モータがON/OFFを切り替える際にブレーキ解除音が発生しますが、異常ではありません。診断完了まで待機してください。
バーチャルTPの画面キーボードのShiftキーとバーチャルTPの [OK] ボタンを同時に押している間動作します。
|
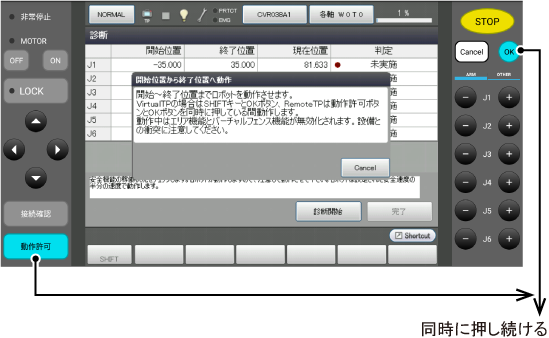
Remote TPの画面リモートTPの [動作許可] ボタンと [OK] ボタンを同時に押している間動作します。
|
3
診断動作を開始すると、COBOTTAの各軸が、"開始位置" へ移動し、その後、"終了位置" まで移動します。そのときの外部速度は、診断動作開始時に、診断設定の "動作速度[%]" で設定した値に自動的に設定されます。診断設定の "動作速度[%]" の初期値は50%です。この速度(最高速度に対するパーセンテージ)は変更することができます。後述の "設定パラメータ" を参照してください。
終了位置まで移動すると、下図のような終了メッセージが表示されるので、それまでボタンを押し続けてください。どちらかのボタンを離すとCOBOTTAは停止します。
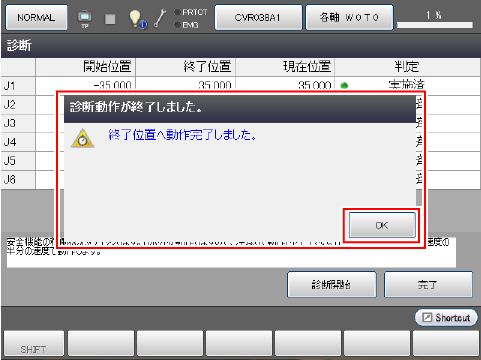
4
終了メッセージの [OK] ボタンを押して、終了メッセージを閉じます。
[診断] ウィンドウの "判定"の内容が、全ての軸において"実施済"となっていたら、COBOTTAの位置検出機能および速度検出機能は正常です。

[完了] ボタンを押し、[診断] ウィンドウを閉じます。
これで、診断動作は終了です。
設定項目の説明
[診断] ウィンドウのファンクションキーを使用して、"開始位置" または "終了位置" の変更や、パラメータの設定をすることができます。
| ファンクションキーの説明 | |
|---|---|
| [F1 開始位置取込み] | 現在のCOBOTTAの位置を、診断動作の開始位置として上書きします(1軸~6軸のすべての軸を上書き)。 |
| [F2 終了位置取込み] | 現在のCOBOTTAの位置を、診断動作の終了位置として上書きします(1軸~6軸のすべての軸を上書き)。 |
| [F4 クリア] | すべての軸の"判定"の内容を、"未実施"にします。 |
| [F5 編集] | "開始位置" または "終了位置" の任意の軸にカーソルがあたっている場合、その設定値を編集します。 |
| [F6 設定] | 診断動作に関連するパラメータの設定ウィンドウを開きます。後述の"設定パラメータ"を参照してください。 |
"開始位置" または "終了位置" を変更後、"開始位置" から "終了位置" までの動作角度がチェックされます。動作角度が診断動作角度より小さい軸があると、下図のようにシステムメッセージが表示され、その軸の角度値が赤く表示されます。この状態では、診断動作を実施しても、"判定"は"実施済"になりません。
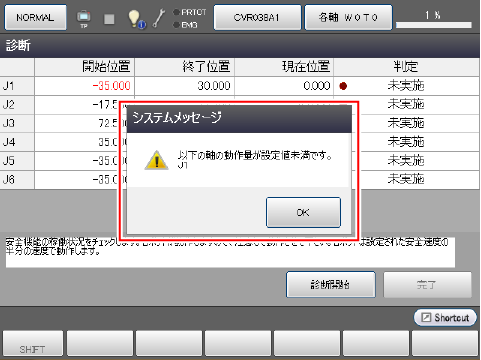
"開始位置" または "終了位置" を変更する場合、必ず動作角度が下記の診断動作角度以上になるようにしてください。
| 軸 | 診断動作角度 |
|---|---|
| 1軸 | 70° |
| 2軸 | 35° |
| 3軸 | |
| 4軸 | 70° |
| 5軸 | |
| 6軸 |
設定パラメータ
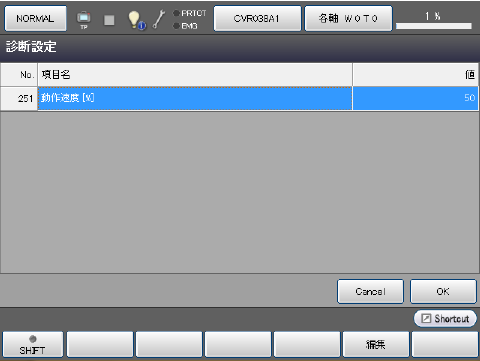
[診断] ウィンドウで [F6 設定] を押すと、下図のような [診断設定] ウィンドウが表示されます。
パラメータの内容は以下の通りです。
| 設定パラメータ | 値 |
|---|---|
| 251 : 動作速度[%] |
診断動作を行う時の、COBOTTAの動作速度です。最高速度に対するパーセンテージを設定します。 |
ID : 7277