
ID : 7271
アームの手動操作
リモートTP/バーチャルTPのキー操作で、アームを移動させることができます。
以下の手順でアームを移動します。
操作手順
ロボットを手動で動かす前には、必ず以下の項目を確認してください。
- ロボットの設置状況が正常であること。
- ロボットの動作範囲に人がいないこと。
1
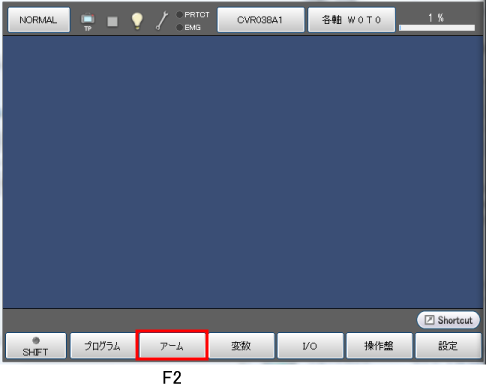
初期画面で、[F2 アーム]を押します。
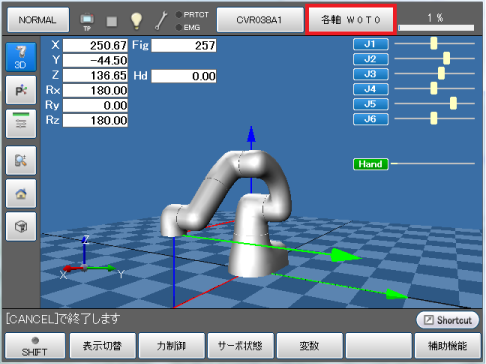
画面に現在位置を表示させなくても、ロボットの各アームの操作は可能です。
2
手動操作の動作モードは、初期値では「各軸モード」になっています。別の動作モードにしたい場合は、動作モードを切り替えます。操作方法は「手動操作時のモード変更」を参照してください。
3
速度・加速度を設定します。
初期値では、速度は1%になっています。
操作方法は「外部速度の設定」を参照してください。
4
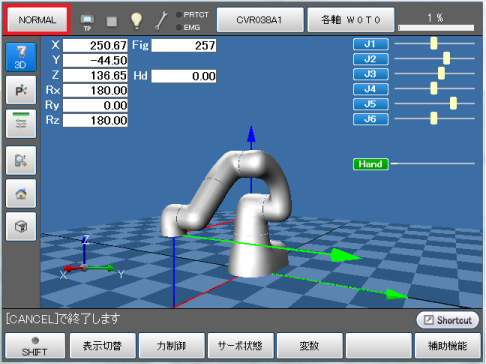
通常モードになっていることを確認します。
ダイレクトモードまたはダイレクト準備モードになっている場合は、キー操作によるロボットの動作はできません。通常モードへ切り替えてください。モードの切り替え方法については、「動作モードの切り替え方法」を参照してください。
5
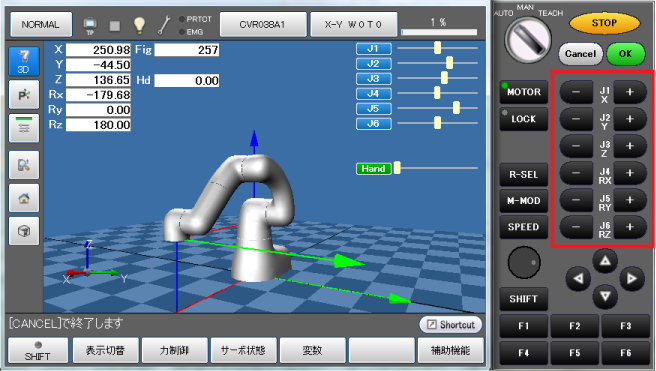
この操作を行うとロボットが動作します。作業者はロボットの動作範囲から出てください。
バーチャルTP:キーボードのShiftキー+移動方向キー(「+」「-」)を押すと、モータ電源がONになり、アームが動作します。
リモートTP:動作許可ボタン+移動方向キー(「+」「-」)を押すと、モータ電源がONになり、アームが動作します。
移動方向キーを押すのをやめると、アームの動作は停止します。
アームの移動に合わせて、画面上の現在位置の表示が変化します。
移動方向キーの役割は、動作モード毎に異なります。詳細は、「基本画面とアイコン」を参照してください。
下図の画面は、X-Yモードで操作している例です。
ID : 7271