
ID : 4030
画面説明
リモートTP/バーチャルTPのコマンド
リモートTP/バーチャルTPのキー、ボタン、およびスイッチを使用すると、液晶画面に各種の画面を表示することができます。
そのどの画面も、独自のコマンドメニューを備えています。コマンドメニューでは、ファンクションキーを押してコマンドを選択します。
各部の名称
- リモートTP

- バーチャルTP

ツールバー
- リモートTP

- バーチャルTP

| № | 名称 | 説明 |
|---|---|---|
| (1) | 切断ボタン | COBOTTAとの通信を切断します。 |
| (2) | 接続状態表示 | 通信状態を表示します。 接続中は、アイコン右下のランプが点滅します。 |
| (3) | 接続先情報 | リモートTPに登録した接続先の名称を表示します。 括弧内は、接続先のIPアドレスとシリアルNo.を表示します。 |
| (4) | メニュー | 利用規約、バージョン情報、著作権情報、MACアドレスを表示します。 |
| (5) | Shift+Cancelボタン | 「Shift + Cancel」を実行します。 |
| (6) | スナップショットボタン | 表示されている基本画面を指定した形式で保存します。 |
| (7) | 表示ボタン | 基本画面の大きさを変更します。 |
| (8) | オプションボタン | 接続時のタイムアウトや自動切断設定を行います。 |
| (9) | ヘルプボタン | バーチャルTPのユーザーズガイドやアプリケーションバージョンを表示します。 |
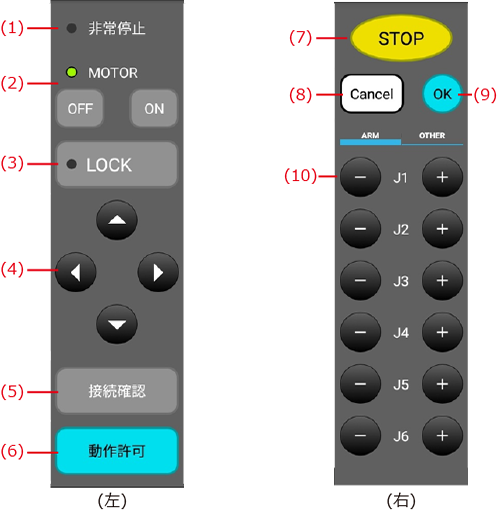
操作パネル
- リモートTP
- バーチャルTP
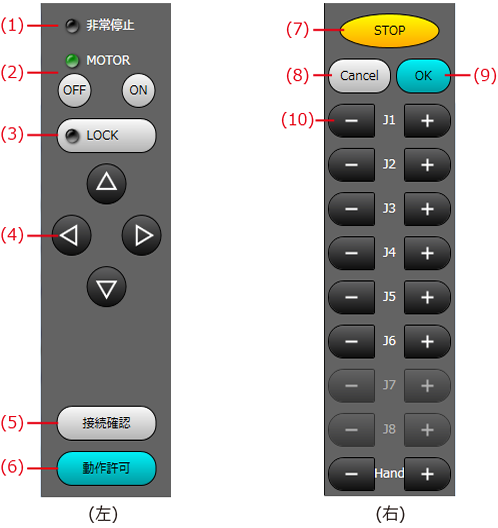
| № | 名称 | 説明 |
|---|---|---|
| (1) | 非常停止状態表示 | 非常停止の状態を表示します。非常停止時は、ランプが点灯します。 |
| (2) | モータボタン | モータをON/OFFすることができます。 モータON時は、ランプが点灯します。 |
| (3) | ロックボタン | マシンロックをON/OFFすることができます。 マシンロックON時は、ランプが点灯します。 |
| (4) | 矢印ボタン | 基本画面のカーソルを移動できます。 |
| (5) | 接続確認ボタン | 接続しているCOBOTTAを確認します。 ボタンを押すとCOBOTTAのLEDが緑色に点滅します。 |
| (6) | 動作許可ボタン | 変数移動など、ロボットを動作させるときに押す必要があります。 |
| (7) | Stopボタン | 「Stop」を実行します。 |
| (8) | Cancelボタン | 「Cancel」を実行します。 |
| (9) | OKボタン | 「OK」を実行します。 変数移動など、ロボットを動作させるときには動作許可ボタン(タッチパネル非対応のパソコンの場合はShiftキー)を押している必要があります。 |
| (10) | 各軸操作ボタン | 対応した軸を動作させます。 動作許可ボタン(タッチパネル非対応のパソコンの場合はShiftキー)を押している必要があります。 |
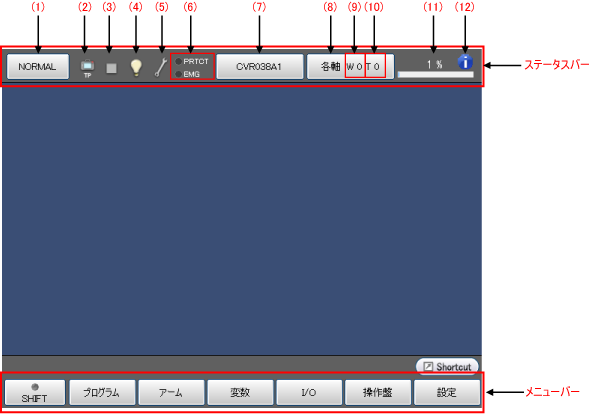
ステータスバー
接続先のCOBOTTAのIPアドレス、注釈、現在時刻を表示します。
バーチャルTPのみ表示領域があります。
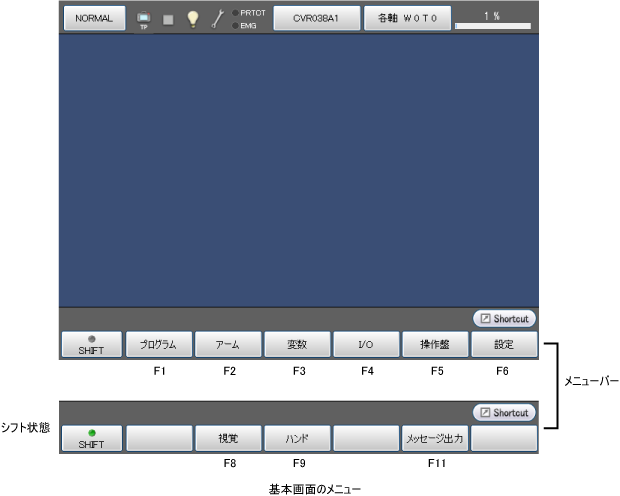
基本画面
基本画面を表示します。コマンドメニュー内のコマンドには、この基本画面から順々にたどっていくことができます。
基本画面は、リモートTPとバーチャルTPで共通です。
初めてCOBOTTAの電源を入れると、言語選択画面を表示します。
設定方法については、「COBOTTAの電源を入れる」を参照してください。
アイコン
基本画面のステータスバーに表示されるアイコンについて以下の表を参照してください。
| № | 名称 | 説明 | |
|---|---|---|---|
| (1) | 動作モード | 通常モード | |
| ダイレクト準備モード、ダイレクトモード | |||
| (2) | 起動権 |  |
TP |
 |
I/O | ||
 |
Ethernet | ||
| (3) | プログラム実行状態 |  |
プログラム停止中 |
 |
プログラム実行中 | ||
 |
特権タスク実行中 | ||
 |
プログラムと特権タスク実行中 | ||
 |
メッセージ出力 (PrintMsgコマンド実行時に表示) | ||
| 特異点近傍 | |||
| (4) | I/O状態・アーム状態 |
 |
擬似入力未使用かつI/Oロック未設定 (注)I/Oロック:外部機器とのI/O通信を制限 |
 |
擬似入力使用中もしくはI/Oロック状態 | ||
 |
バーチャルフェンス、または排他機能が有効です。 |
||
| (5) | システム状態 |  |
システム正常状態 |
システム異常状態 ・バッテリ警告 ・エンコーダシステムダウン ・致命的なエラー(レベル5のエラーが発生時) |
|||
| (6) | スイッチ入力状態 | EMG | 非常停止状態 |
| PROTECT | 防護停止状態 | ||
| (7) | ロボット選択ボタン |
|
ロボットタイプの選択と表示 |
| (8) | 手動操作時の 動作モード |
|
手動操作時の動作モード(「各軸」、「X-Y」、「TOOL」)が表示されます。 |
| (9) | ワーク座標 |
|
選択しているワークの番号を表示します |
| (10) | ツール座標 |
|
選択しているツールの番号を表示します |
| (11) | 速度ボタン |
|
外部速度の設定と表示 |
| (12) | インチングモード |  |
インチング動作時 |
ID : 4030