
ID : 4042
手動操作時のモード変更
リモートTP/バーチャルTPのキー操作でアームを移動させる動作モードには、「各軸モード」、「X-Yモード」、「TOOLモード」の3種類があります。
各モードの詳細は、機能ガイドの「手動操作」を参照してください。
以下の手順でモードの切り替えを行います。
動作モードの切り替え手順
運転開始時は速度を20%以下に設定して操作してください。初めから高速で動作させると、誤ってロボットを周囲の設備に衝突させるおそれがあります。
1
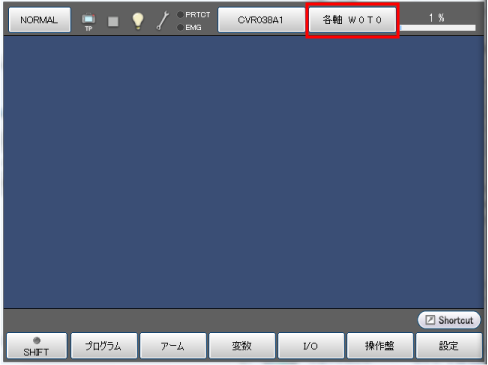
ステータスバーのモード表示部分を押します。
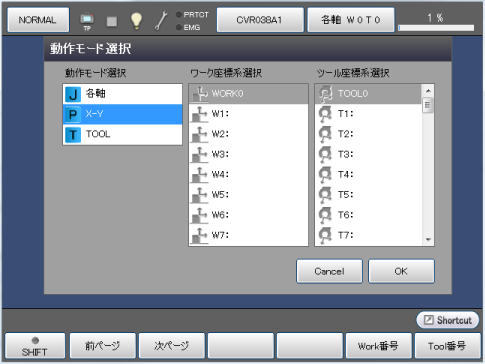
次のステップに示すような[動作モード選択]ウィンドウが表示されます。
2
カーソルキーを使うか、画面に直接タッチしてモードを選択し、[OK]を押します。
3
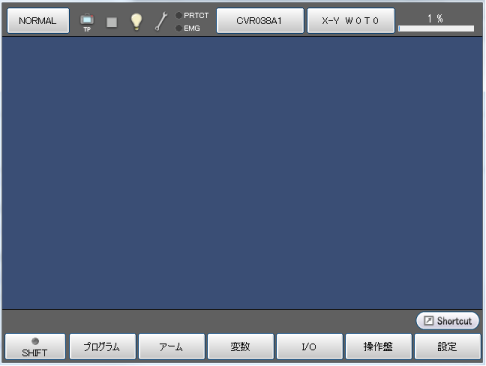
ステータスバーのモード表示部分に選択した動作モードが表示されます。
ID : 4042