
ID : 7874
I/O的设定
设定与机器人控制器进行通信所需的I/O。
以下说明其步骤。
1
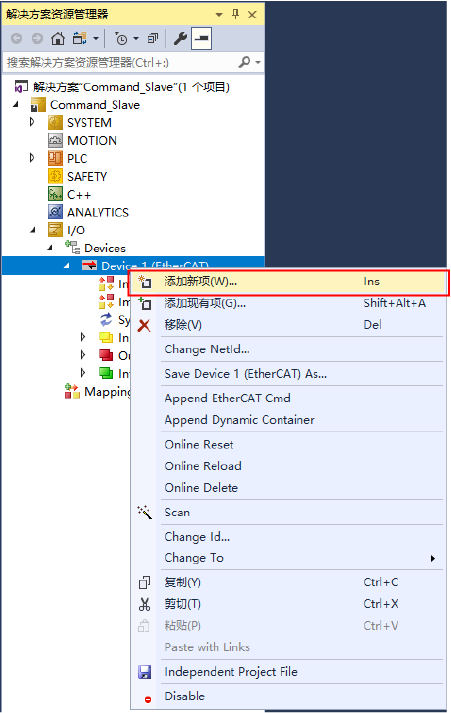
右击“解决方案 资源管理器”标签的“Devices”。
点击[添加新项目]。

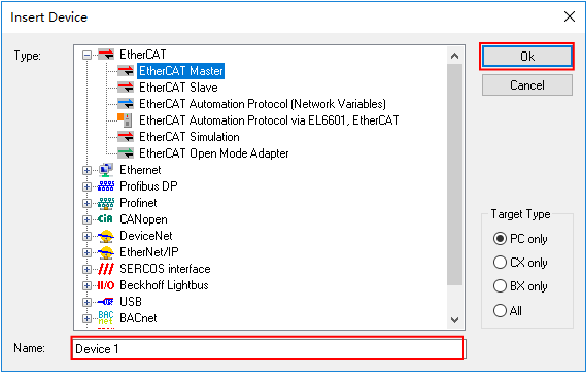
2
选择使用的现场网络的种类。
在这个例子中,选择“EtherCAT Master”。
输入任意的名称,点击[OK]。
3
点击[Cancel]。
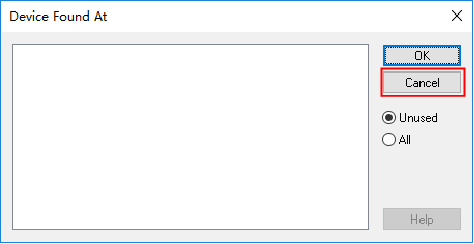
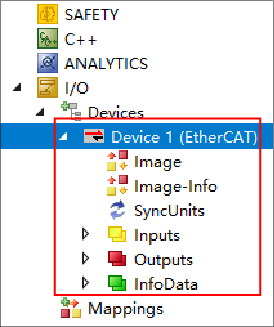
在“Devices”的下层添加选择的现场网络的项目。
4
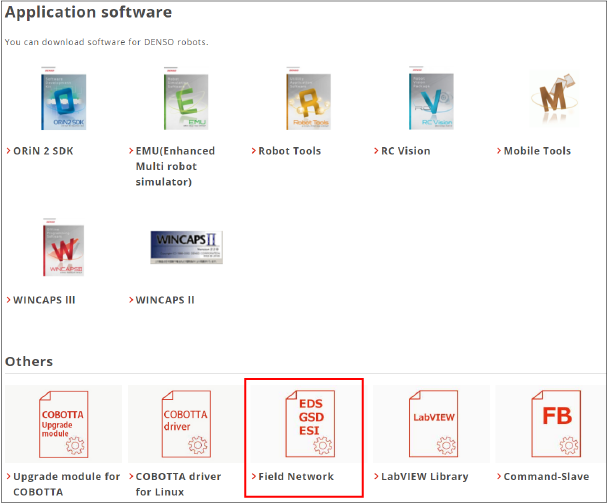
从下述URL访问DENSO WAVE机器人网站,下载现场网络设定文件。
https://www.denso-wave.com/ja/robot/download/application/
点击“应用软件”页面内的“现场网络设定文件”。
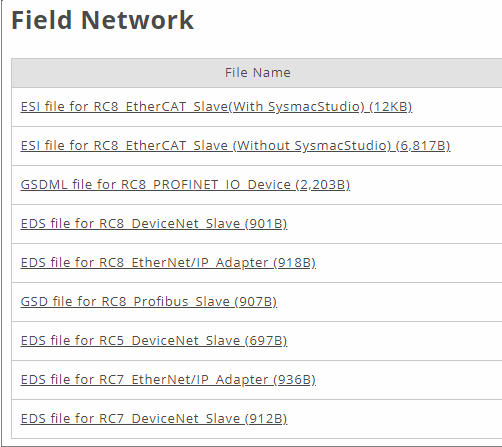
5
下载与使用的现场网络相符的设定文件。
在这个例子中,下载“RC8 EtherCAT Slave用ESI文件(使用SysmacStudio以外时)”。
6
解压下载的现场网络设定文件,安装到应用程序中。
在这个例子中,将下载的文件保存到下述文件夹,安装完成。
C:\TwinCAT\3.1\Config\Io\EtherCAT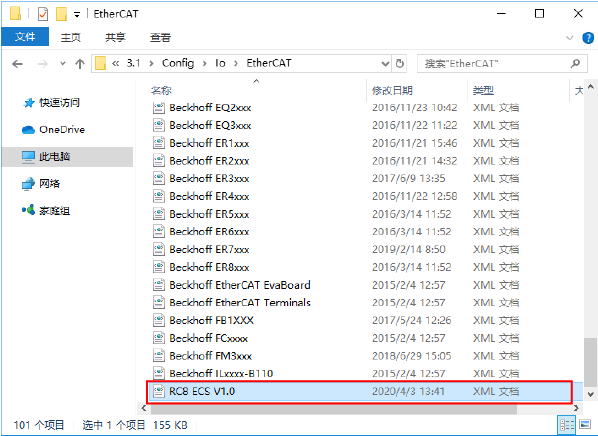
7
右击在STEP3添加的现场网络的项目。
点击[添加新项目]。
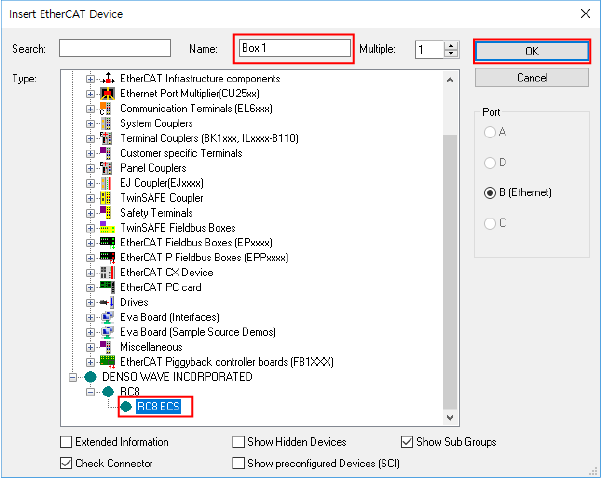
8
选择[DENSO WAVE INCORPORATED] - [RC8] - [RC8 ECS]。
输入任意的名称,点击[OK]。
9
ECS文件被追加。
双击添加的项目。
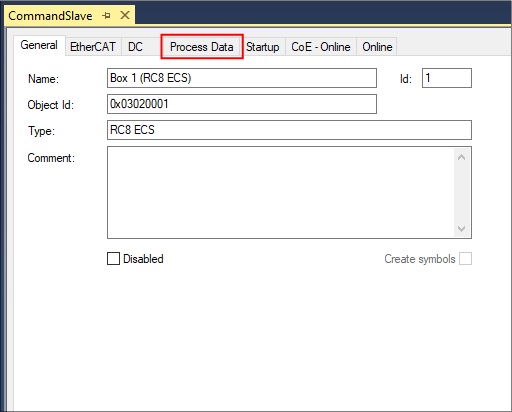
10
显示属性。
选择“Process Data”标签。
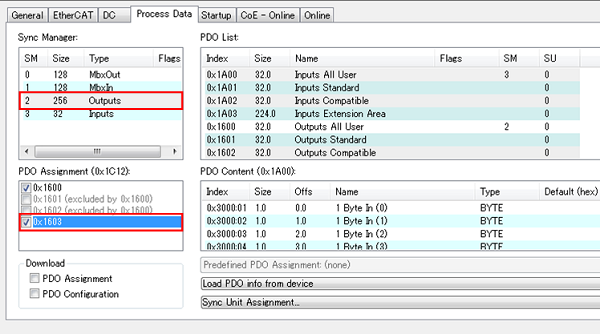
11
选择“Sync Manager”项目的“Outputs”,勾选“PDO Assignment”项目的“0x1603”。
12
接着,选择“Sync Manager”项目的“Inputs”,勾选“PDO Assignment”项目的“0x1A03”。
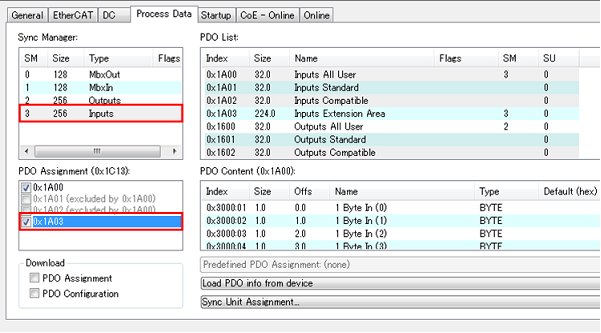
到此,I/O的设定就完成了。
ID : 7874