
ID : 7628
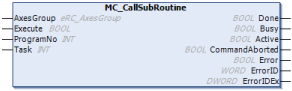
MC_CallSubRoutine
调出机器人程序。
| 图形显示 | FB范畴 |
|---|---|
 |
动作 |
输入输出变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可以 | ||
|
||||
输入变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可以 |
|
||||
| ProgramNo | INT | 0以上 | 0 | 可以 |
|
||||
| Task | INT | 0.1 | 0 | 可以 |
|
||||
输出变量
| 变量名 | 数据型 / 说明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Active | BOOL |
|
|
| CommandAborted | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
功能说明
- 关于特权任务
- 特权任务为可执行任务,与机器人控制器的运行模式无关。
注意事项
若要执行这个FB,需要事先将FB范畴"动作"的FB设为可执行状态。
若要将FB范畴"动作"的FB设为可执行状态,使用FB"MC_Power"。
ID : 7628