
ID : 5931
作业内容
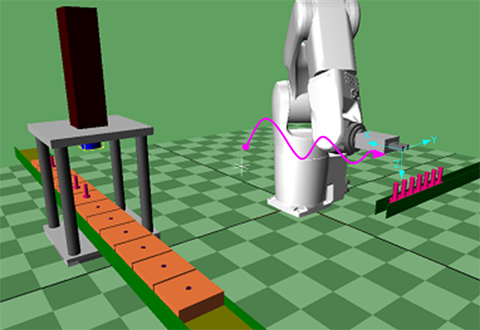
机器人按照以下所示夹持工件并辅助压入。压入时通过将依从功能设定为有效来效仿挤压方向。
1
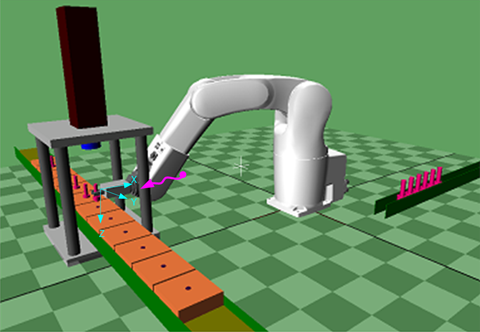
将工具坐标系变更为TOOL1,移动至工件上方位置(P1的趋近位置)。
2
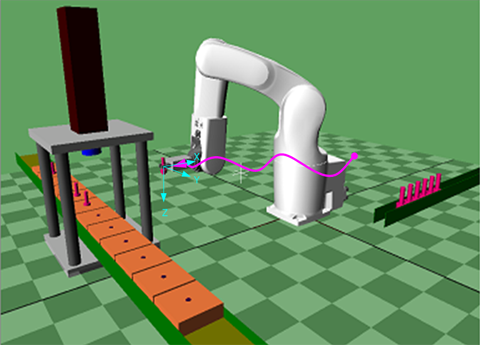
移动至工件位置(P1)后夹持工件。
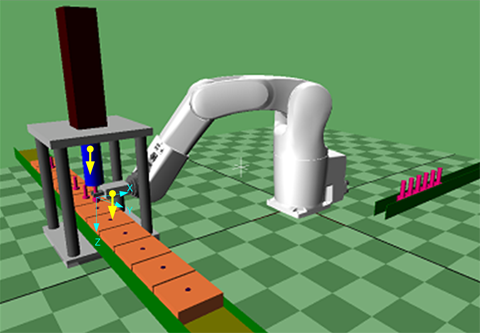
3
从工件位置移动至上方(从P1到工具坐标-Z方向)。
4
移动至挤压前位置(P2)。
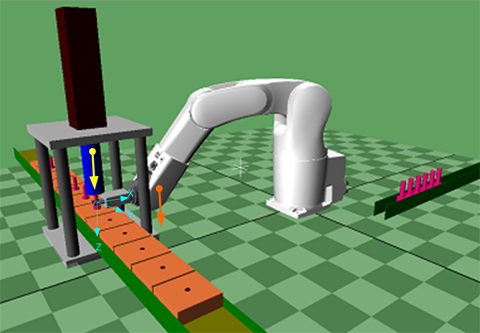
5
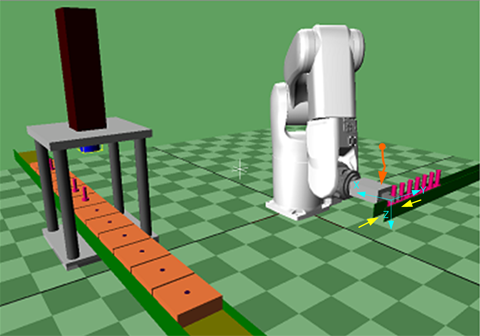
移动至压入上方位置(P3的趋近位置)。
6
移动至压入位置(P3)并将依从功能设定为有效。
起动挤压机。
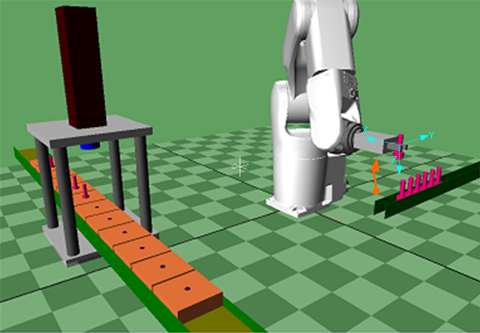
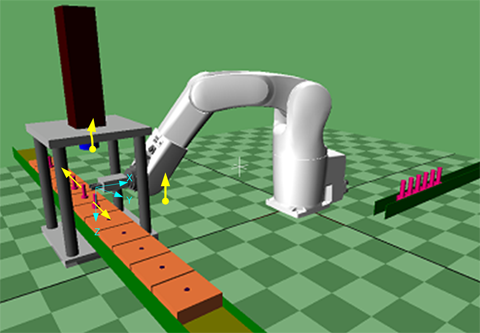
7
开始压入。此时依从功能为有效,因此机器人向挤压方向效仿。
8
压入完成后上升挤压机,并将依从功能设定为无效。
松开工件,从压入位置返回上方(P3到工具坐标-Z方向)。
9
返回至挤压前位置(P2)。
ID : 5931