
ID : 5381
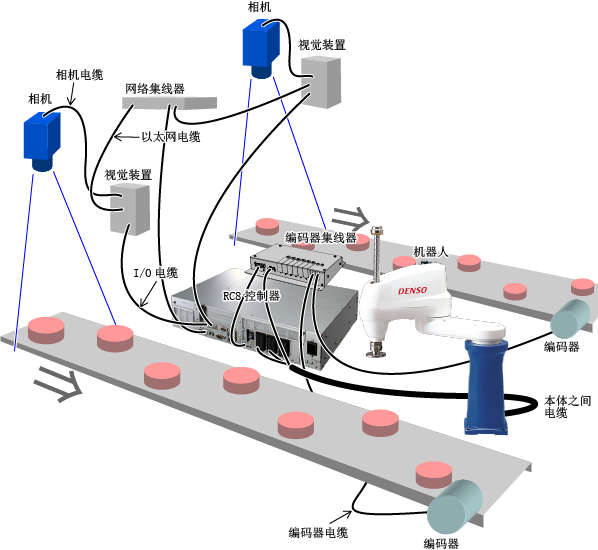
2条传送带、1台机器人的构成
下图为视觉跟踪的示例。
在传送带运行较慢,机器人有充足的时间进行挑选动作等情况下使用。
在获取工件的位置信息时,也会获取传送带编号,机器人根据该信息挑选相应传送带上的工件。
传送带跟踪
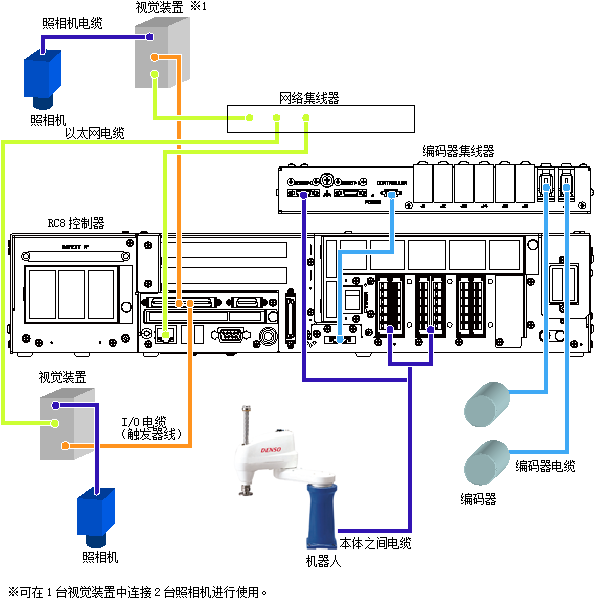
接线图
关于接线,请参照下图。
需要预先将2台传送带的编码器连接至主局控制器。
关于编码器集线器
编码器集线器有旧件和新件。
使用新件时,请将本体间电缆的编码器线接在编码器集线器上刻有“ROBOT-0”字样的(从正面观察位于左侧)连接器上。
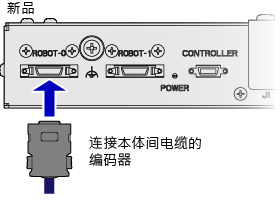
有关外形尺寸及设置上的注意,请参照“编码器集线器”。
附加轴跟踪
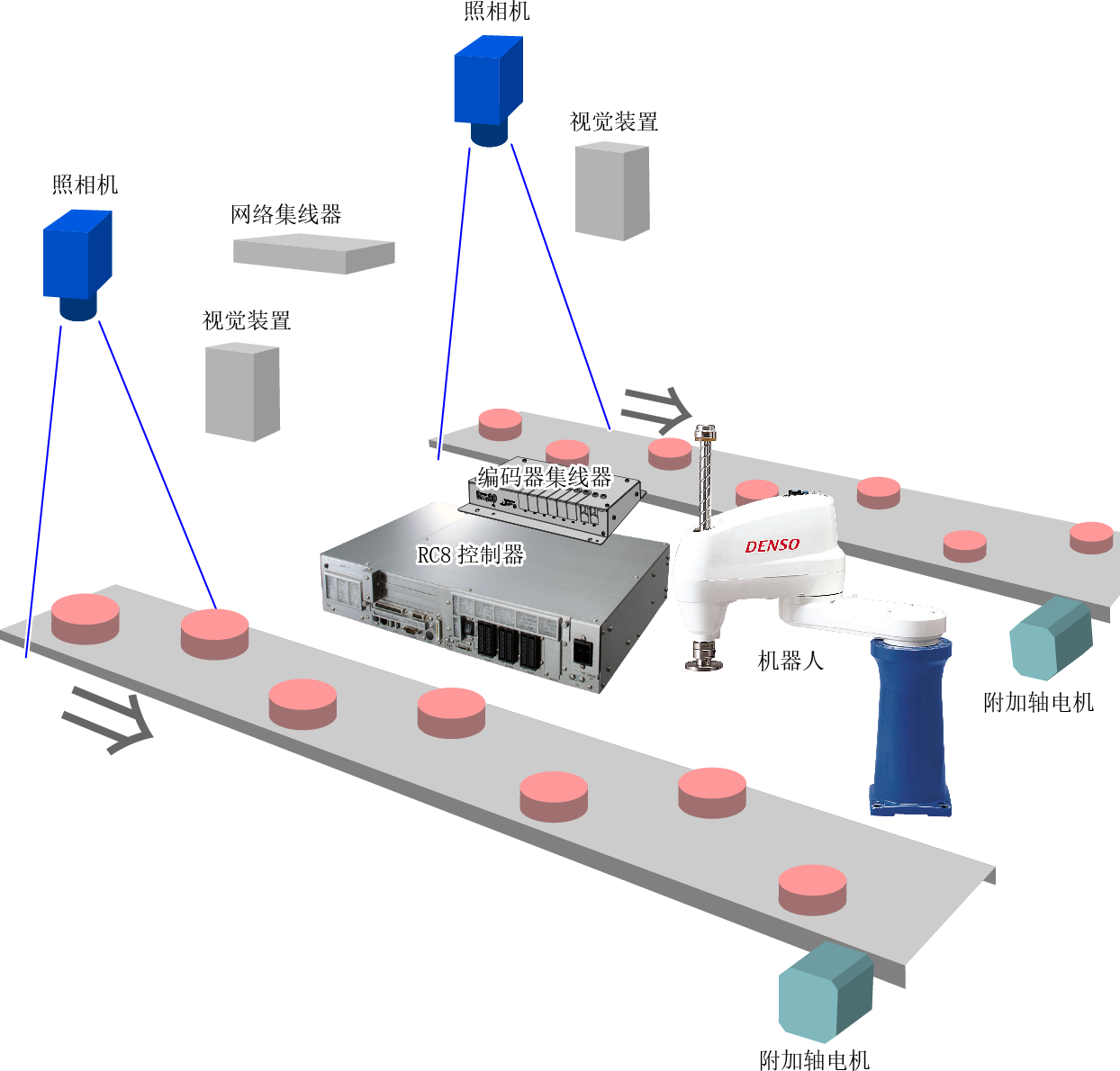
接线图

关于编码器集线器
编码器集线器有旧件和新件。
使用新件时,请将本体间电缆的编码器线接在编码器集线器上刻有“ROBOT-0”字样的(从正面观察位于左侧)连接器上。
有关外形尺寸及设置上的注意,请参照“编码器集线器”。
ID : 5381