
ID : 5380
1条传送带、2台以上机器人的构成
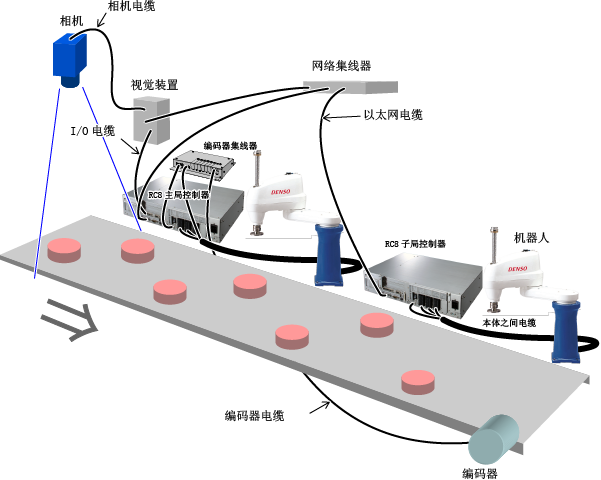
下图为视觉跟踪的示例。
在传送带运行较快,1台机器人无法应对等情况下使用。
使用控制器时,将1台作为主局控制器,其它作为子局控制器。最多可使用3台子局。
主局控制器连接视觉装置和编码器,读取工件的位置信息并通过机器人挑选工件。
子局控制器通过以太网电缆连接主局控制器,根据通过主局控制器读取的工件位置信息,进行工件的挑选。
传送带跟踪
- 安装多台机器人时,在配置时要避免机器人之间发生干扰。
- 需要使用相同规格的主局控制器和子局控制器(有附加轴、有传送跟踪的许可证、软件版本相同)。
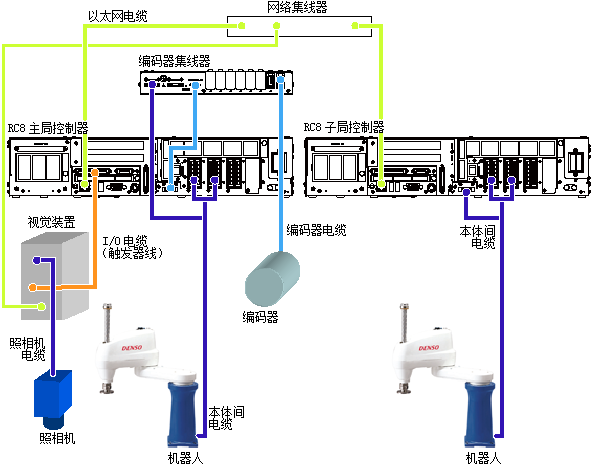
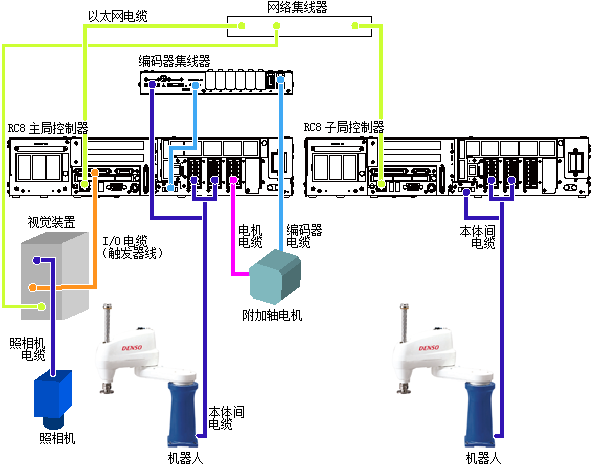
接线图
关于接线,请参照下图。
关于编码器集线器
编码器集线器有旧件和新件。
使用新件时,请将本体间电缆的编码器线接在编码器集线器上刻有“ROBOT-0”字样的(从正面观察位于左侧)连接器上。
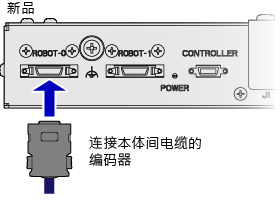
有关外形尺寸及设置上的注意,请参照“编码器集线器”。
附加轴跟踪
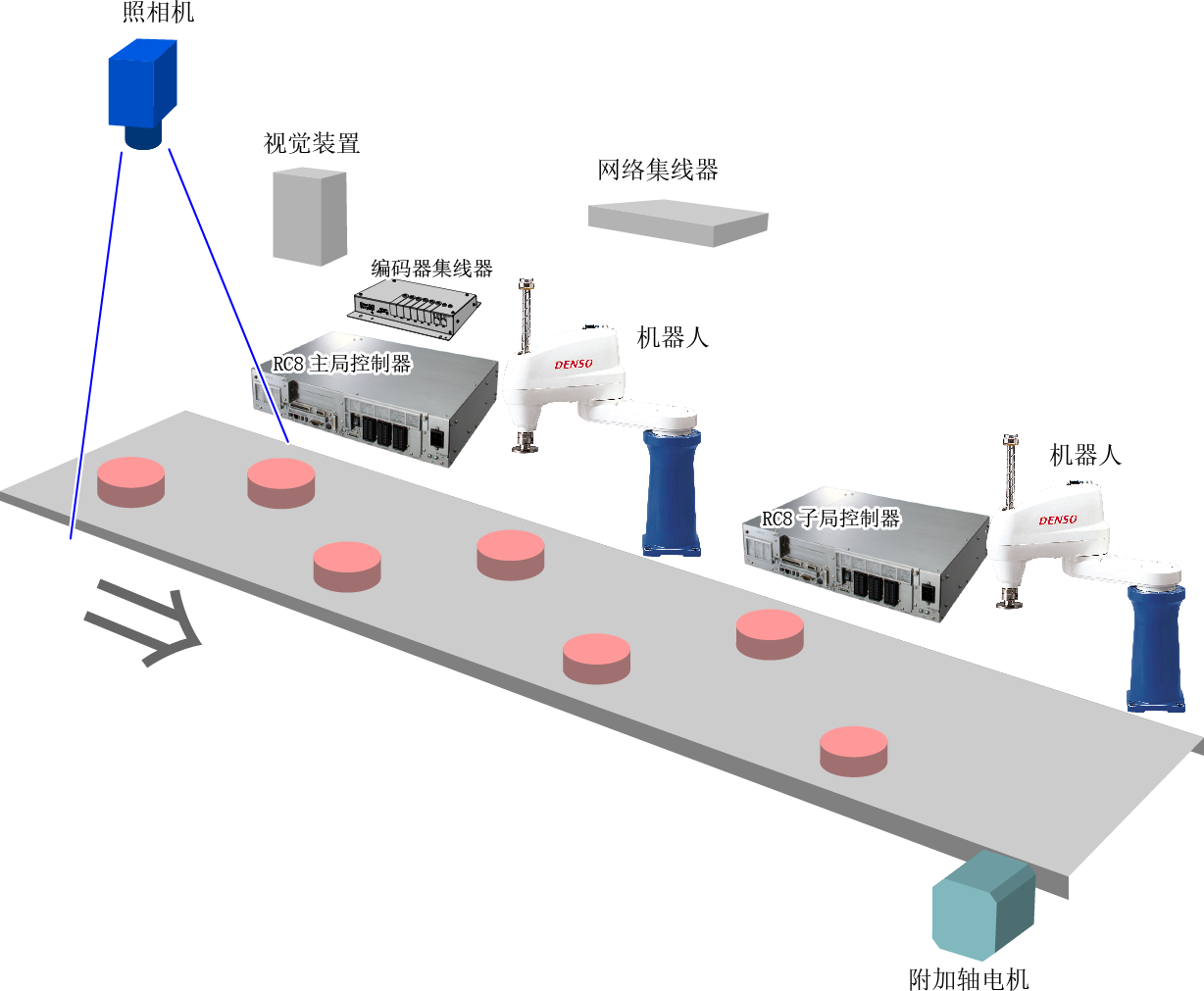
接线图
需要使用相同规格的主局控制器和子局控制器(有附加轴、有附加轴跟踪的许可证、软件版本相同)。
关于编码器集线器
编码器集线器有旧件和新件。
使用新件时,请将本体间电缆的编码器线接在编码器集线器上刻有“ROBOT-0”字样的(从正面观察位于左侧)连接器上。
有关外形尺寸及设置上的注意,请参照“编码器集线器”。
ID : 5380