
ID : 5339
校准实施步骤
按照如下步骤执行校准。
1 校准步骤的确认
确认校准步骤后,按[下一步]。

2 传感器通过确认
工件通过传感器。
工件通过传感器时,确认跟踪缓冲区中积累了编码器值,如果正确,则按[下一步]。
输入了触发信号的时机的编码器值被保存在跟踪缓冲区。

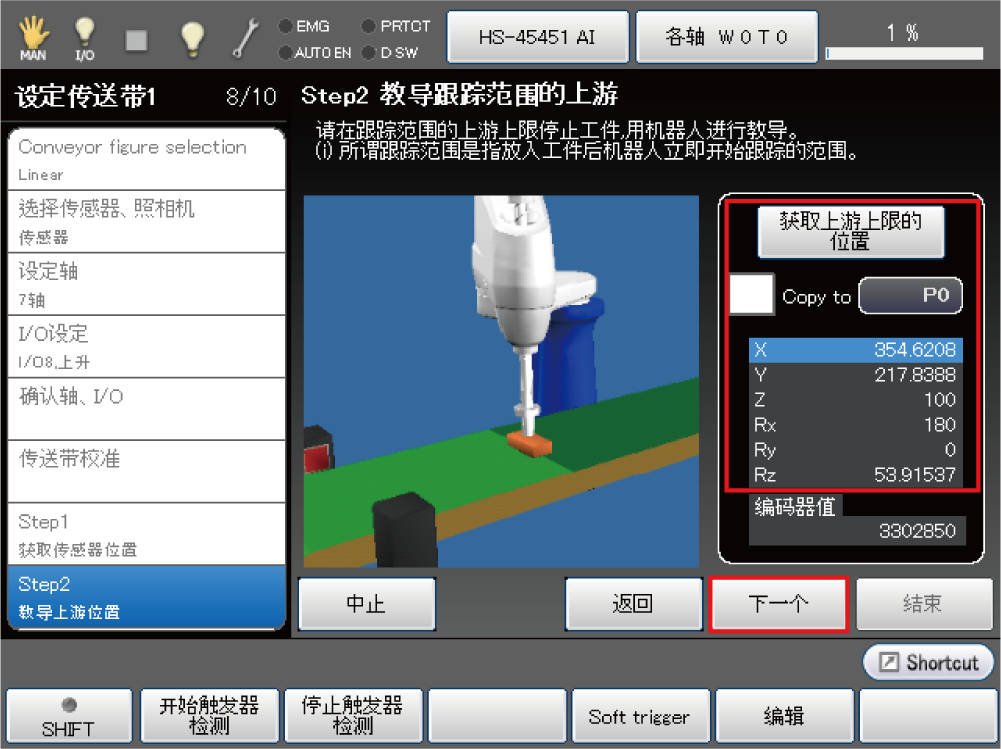
3 跟踪范围上游上限的示教
将工件停在跟踪范围上流侧的界限位置,将机器人移至工件上部,并按压[获取上游上限的位置]。
获取机器人位置。
确认获取的值,如果正确,则按[下一步]。
- 再次获取机器人位置时,显示是否获取位置的系统讯息。
- 获取上游上限的位置时的姿势就是工件夹持基准姿势。
- 跟踪动作时的夹持高度就是在上游上限和下游下限获取的位置的中点高度。
按压编辑按钮后,可变更位置的坐标。
使用获取传送带上流和下流位置的坐标和此时获取的编码器值,计算传送带的进给量和方向。因此,在考虑影响传送带的进给量和方向的因素后,再编辑坐标值。
4 跟踪范围下游下限的示教
将工件停在跟踪范围下流侧的界限位置,将机器人移至工件上部,并按压[获取下游下限的位置]。
获取机器人位置。
确认获取的值,如果正确,则按[下一步]。
上游上限位置和下游下限位置的中点位置就是传送带基准位置。

5 校准结果的确认
显示计算出的参数值后,确认内容并按压[完成]。
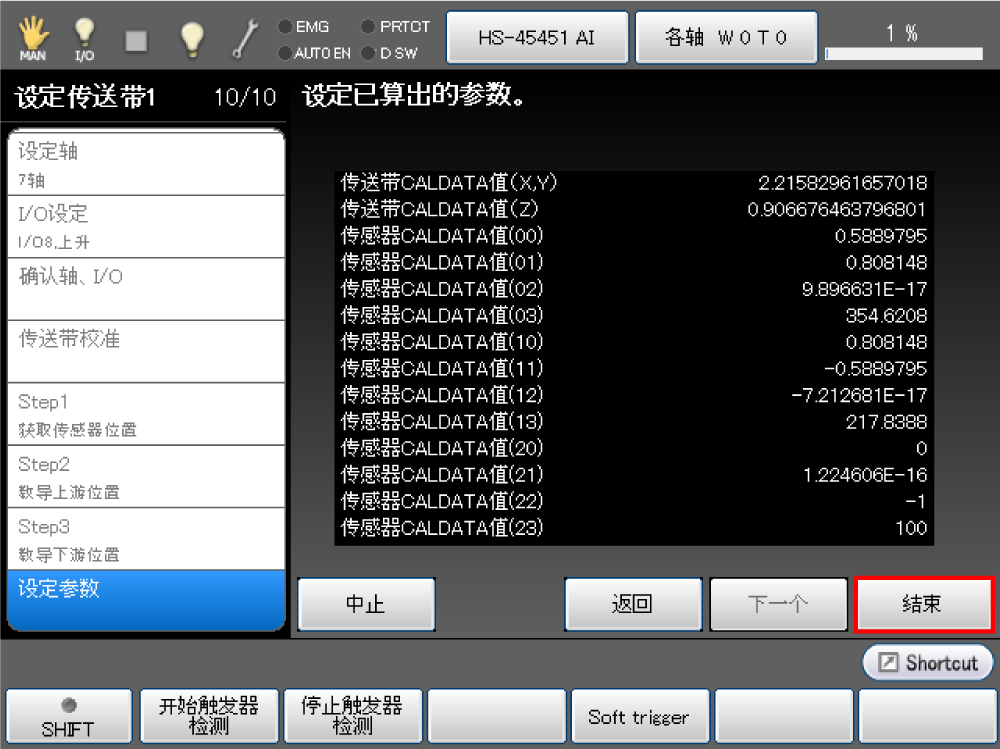
按完成按钮后,进行参数设定处理。在附加轴跟踪中,在电机ON状态下不进行处理。显示系统信息“请关闭电机。”
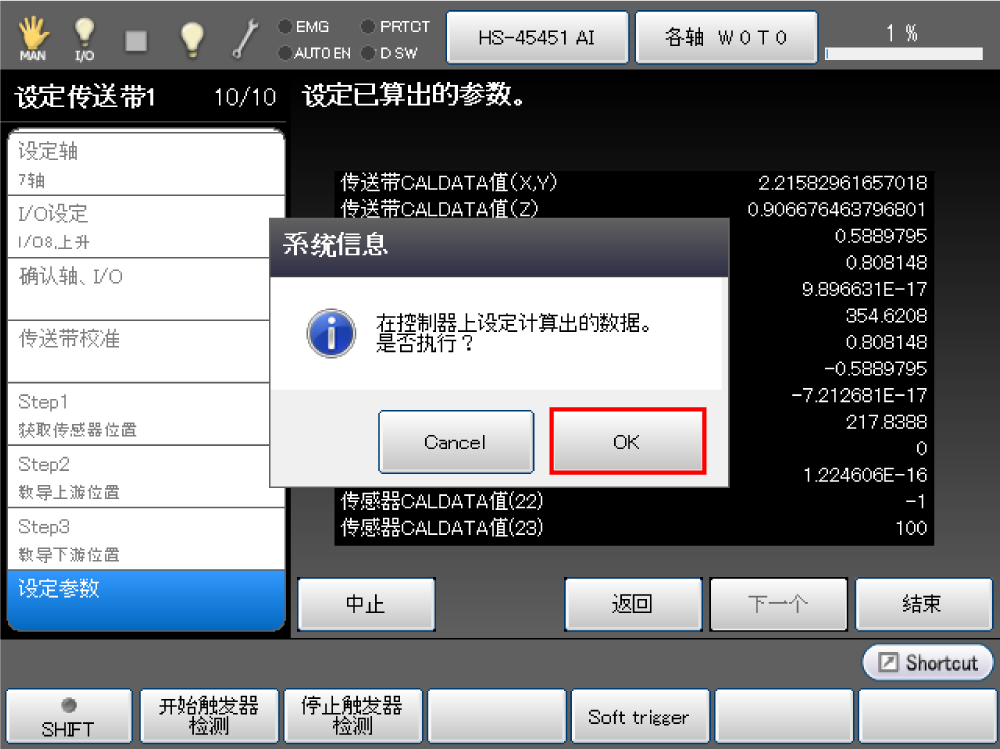
6 校准结果的反映
显示是否将计算出的数据设定至控制器的系统讯息,如果正确,则按压[OK]。
在控制器中设定计算的数据。
如果按压[Cancel],则不执行设定。
保存设定,返回“跟踪”画面。
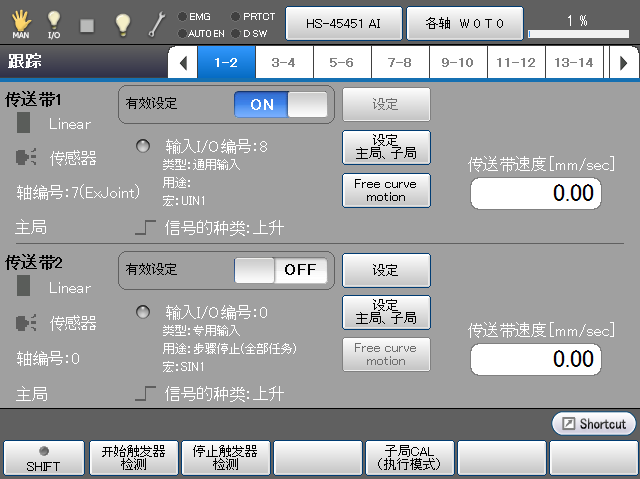
至此,1条传送带、1台机器人时的设置完成。
ID : 5339