
ID : 5319
机器人轴范围的设定方法
机器人轴可通过多功能教导器或WINCAPSIII进行选择。方法如下所示。
- 未指定为机器人轴的轴均为附加轴。
- 变更机器人轴选择后,机械臂组与链接信息的设定将会被初始化。
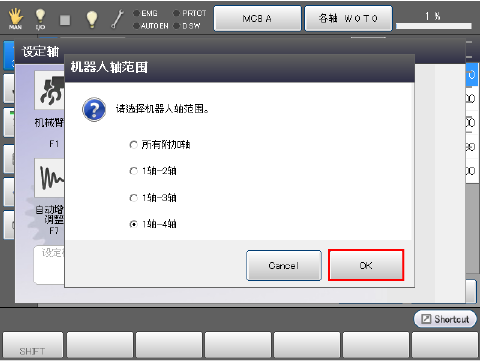
通过多功能教导器设定
1
操作路径:按基本画面-[F2 机械臂]-[F12 保养]-[F10 轴设定]-[F12 设定机器人轴范围]。

显示“机器人轴范围”画面。
2
选择指定为机器人轴的轴,按下[OK]。
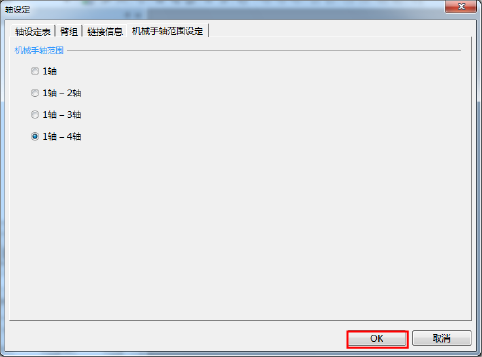
通过WINCAPSIII设定
1
操作路径:选择[项目] - [轴设定表]。
显示“轴设定”画面。
选择[设定机器人轴范围]标签。
选择指定为机器人轴的轴,按下[OK]。
2
选择[通信] - [发送接收数据],显示“发送接收数据”画面。
选择WINCAPSIII - [参数] - [臂 参数],发送至控制器。
ID : 5319