
ID : 5069
路径点设定步骤
通过多功能教导器的操作,对路径点设定步骤进行说明。
设定步骤
1
按压基本画面-[F2 机械臂]-[F6 辅助功能]-[F6 路径点]。
在显示出来的“路径点设定画面”中按压[路径编号],从列表中选择需要设定的路径编号,按压[OK]。
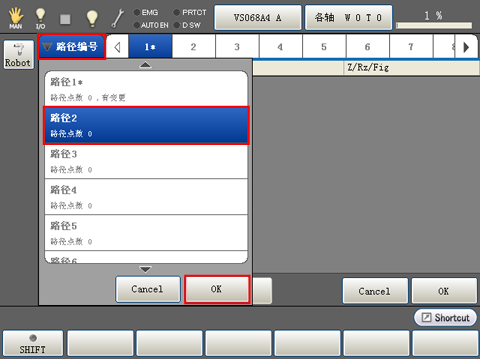
选择的路径编号反衬显示。
2
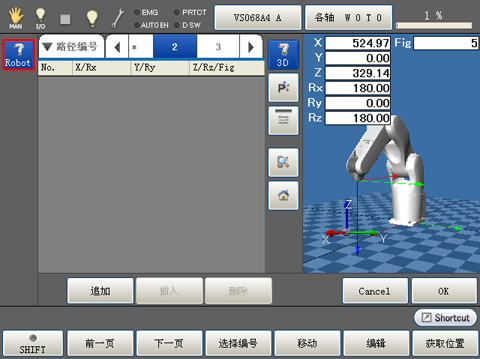
按下[Robot],在画面的右侧显示出机器人的当前位置信息。
操作用存储器中有保存的数据时,显示该数据。
3
机器人向目标位置移动,按压[追加],获取机器人的当前位置。
- 路径点中登录的位置发生变更时,在各路径编号右边显示“*”。
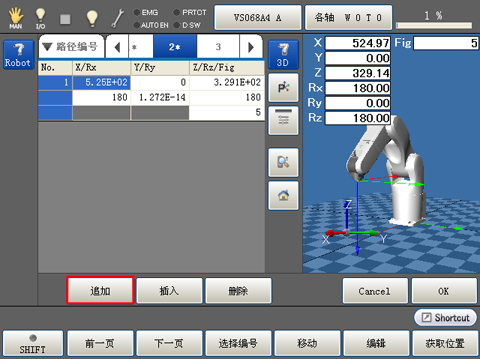
获取机器人的当前位置。
4
重复步骤3,登录所需数量的路径点。
根据需要使用[追加]、[插入]和[删除]进行登录。
- [追加]:在所选择的路径点数据之后插入路径点。
- [插入]:在所选择的路径点数据之前插入路径点。
- [删除]:删除所选择的路径点数据。

- 进行“移动”、“编辑”、“获取位置”、“复制”、“粘贴”时,在路径点设定画面中按压各按钮来进行操作。
- 可登录的路径点数据最多为5000个。
5
全部路径点数据设定结束后,按压[OK]。

保存登录的路径点数据,返回“机械臂辅助功能画面”。
- 仅带有“*”的路径编号数据保存在操作用存储器和保存用存储器中。
-
使用PacScript指令追加路径点时,保存在操作用存储器中。
可在“路径点设定画面”中显示保存的数据。
但是,如果不在“路径点设定画面”中进行编辑,则不能保存在保存用存储器中。
编辑时,路径编号上显示“*”。
详细内容请参照“路径点设定功能”。
不保存关闭画面的情况下,按压[Cancel]。
ID : 5069