
ID : 4899
附加轴的变量指定移动方法
就向指定变量移动的步骤进行说明。
机器人轴和附加轴同时动作时
1
参照“附加轴位置的获取方法”,选择要使用的机械臂组。
以下示例中,选择[Group 1]。

2
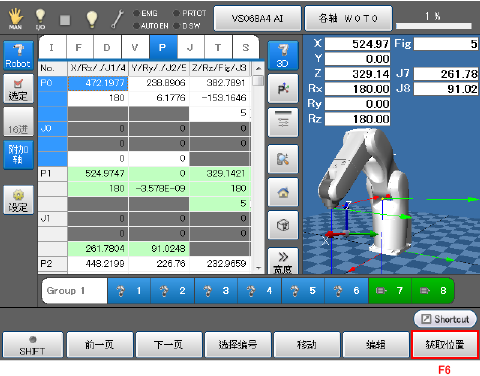
将机器人以及附加轴移至目标位置。
3
按压[F6 位置获取],将位置代入至变量。
4
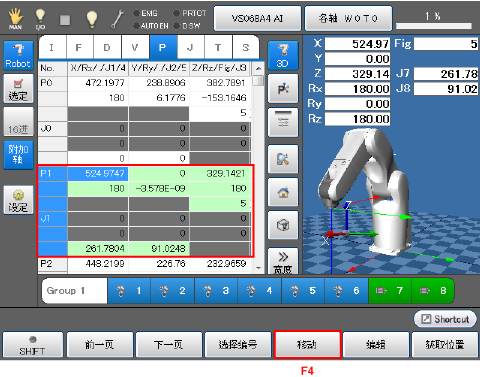
选择要移动的变量,按压[F4 移动]。
以下示例中,选择“P1、J1”。
5
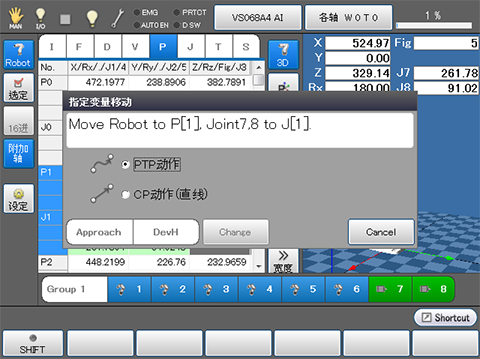
显示“变量指定移动”画面,选择PTP动作或CP动作(直线),按压双重安全开关和[OK]按钮。
以下示例中,选择PTP动作。
显示进度条,开始移动。
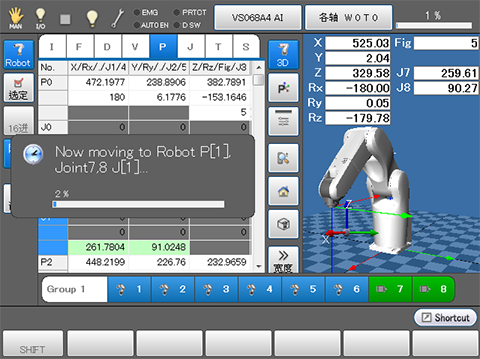
- 移动时,请继续按压双重安全开关以及[OK]按钮。移动时,如果松开双重安全开关或[OK]按钮,则停止移动。
-
仅附加轴可进行各轴的变量指定移动。
选择变量指定移动的附加轴,按压[F4 移动]后,仅指定的附加轴进行变量指定移动。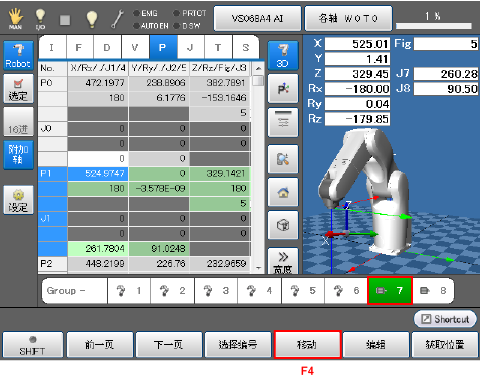
ID : 4899