
ID : 4910
编码器ID的设定步骤
机器人控制器中使用的电机“ID”记录在编码器内,机器人控制器根据该“ID”识别电机并进行控制。如下所示,根据编码器ID区分机器人和附加轴,但由于附加轴电机出厂时的ID为“1”,因此使用前需要正确设定附加轴电机内的ID。
通过粘贴标签等识别编码器ID,请勿错误设定。如果设定错误,则非指定轴可能会意外动作,很危险。
另外,务必进行动作确认。此时应充分确保安全。
与ID相同的电机连接时,如果通电,则可能损坏连接的所有电机。连接电机前,务必设定编码器ID。
机器人、附加轴的编码器ID
机器人+附加轴时
“1”~“机器人轴数”为机器人轴的编码器ID。
将“机器人轴数+1”~“8”识别为附加轴的编码器ID。
(例)6轴机器人时
"1" ~ "6" : 机器人轴
“7”~ “8”: 附加轴
(例)4轴机器人时
"1" ~ "4" : 机器人轴
“5”~ “8”: 附加轴
MC8控制器时
将“1”~“8”识别为附加轴的编码器ID。
设定步骤
以下所示为编码器ID的设定步骤。
1
确认控制器上方的标签,将所有使用的轴的电机与电缆连接。设定为机器锁定状态,并将轴设定为有效。
2
按压基本画面 - [F2 机械臂] - [F12 维护] - [F2 编码器] - [F8 编码器ID设定]。

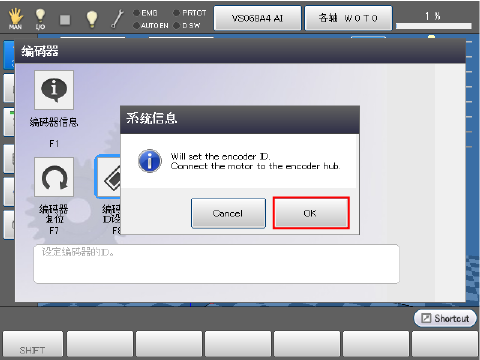
3
显示是否执行编码器ID设定的系统讯息后,如果正确则按压[OK]。
进行编码器ID设定。
如果按压[Cancel],则不执行编码器ID设定。
4
编码器ID设定完成后,显示以下系统讯息。
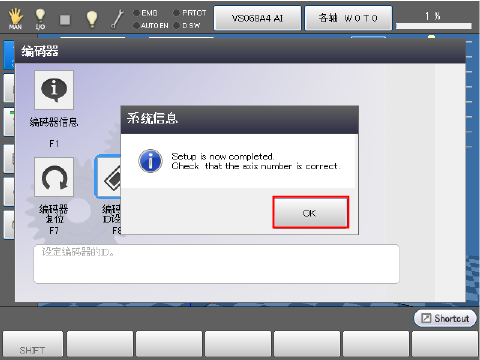
如果按压[OK],则返回到“编码器”画面。
5
确认编码器ID的设定。
将要确认的轴的制动器设定为解除状态,对电机施加外力以使其运行。在多功能教导器的“机器人的当前位置信息”画面中,确认要确认的轴发生变化。
操作路径: 基本画面-[F2 机械臂]
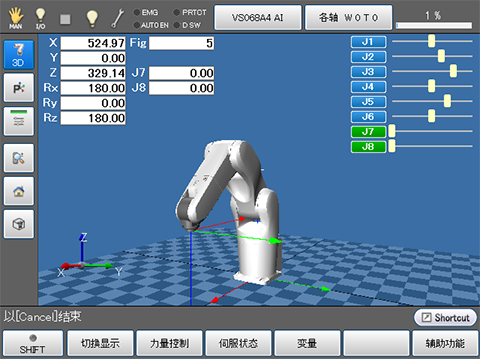
无法解除制动、其它轴的值变化时,确认电机、电缆是否接错。
ID : 4910