
ID : 4897
附加轴的位置输入方法
获取附加轴位置的方法有以下2种。
无论用哪种方法,附加轴的位置都读取到J型变量中。
使用J型变量获取附加轴和机器人轴的位置的方法
读取目标位置时,将机器人轴和附加轴登录至同一机械臂组,即可将机器人轴和附加轴的当前位置同时导入J型变量的相同变量编号中。
变量读取步骤
1
设定机械臂组。
按基本画面 - [F2 机械臂] - [F12 维护] - [F10 轴设定] - [F1 机械臂组]。

显示“机械臂组设定”画面。
2
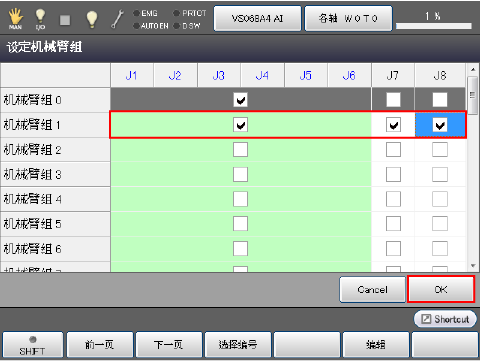
勾选要设定的机械臂组的轴编号。
以下是在机械臂组1上设定“J1~J6”和“J7、J8”的示例。
机械臂组设定完成后,按[OK]。
3
重新接通控制器的电源。
4
选择基本画面 - [F3 变量] - [J型变量]标签。

5
按[附加轴]。

以下项目切换。
- 机械臂组在画面下方显示。

6
按[Group -]。
显示机械臂组的列表,选择要使用的机械臂组编号。
以下示例中选择了[Group 1]。

7
将机器人及附加轴向目标的位置移动。
8
选择要读取位置的变量,按[F6 位置输入]。
以下示例中选择了[J0]。

9
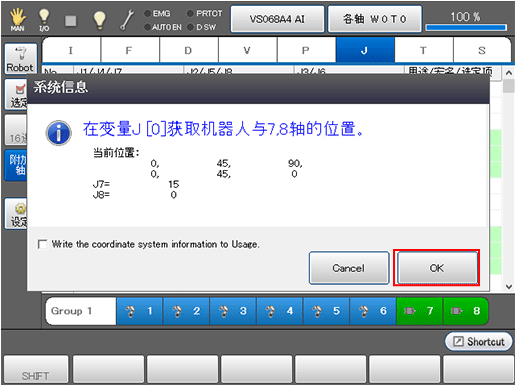
将显示是否读取变量的系统信息,如果正确,则按[OK]。
按[Cancel]则不读取变量。
机器人轴和附加轴的当前位置被获取到J0。
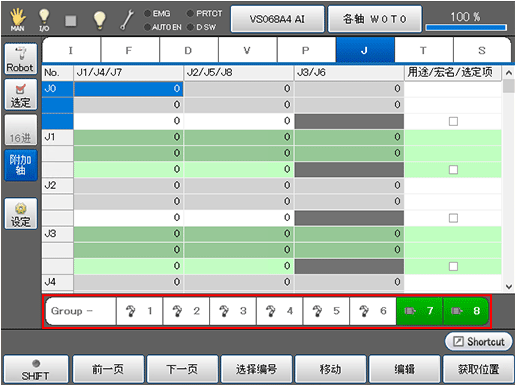
读取的变量如下显示。

通过将机械臂组列表部分的、机器人轴设为无效,不获取机器人轴的当前位置也能单独获取附加轴的位置。
以下是按机器人轴的任意一个(J1~J6),将机器人轴部分从蓝色变更为白色后的状态示例。在该状态下,机器人轴无效。
在该状态下按获取位置后,出现获取确认画面。
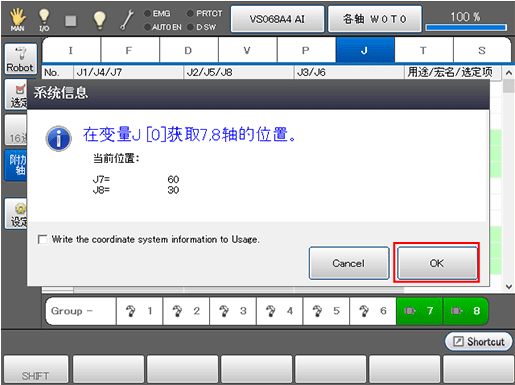
按[OK]后,仅获取附加轴的位置。

使用J型变量和P型变量一并获取附加轴和机器人轴的位置的方法
读取目标位置时,将机器人轴和附加轴登录至同一机械臂组,即可将机器人轴的当前位置同时导入P型变量、仅将附加轴的当前位置同时获取至J型变量的相同变量编号中。
变量读取步骤
1
设定机械臂组。
按基本画面 - [F2 机械臂] - [F12 维护] - [F10 轴设定] - [F1 机械臂组]。
显示“机械臂组设定”画面。
2
勾选要设定的机械臂组的轴编号。
以下是在机械臂组1上设定“J1~J6”和“J7、J8”的示例。
机械臂组设定完成后,按[OK]。
3
重新接通控制器的电源。
4
选择基本画面 - [F3 变量] - [P型变量]标签。

5
按[附加轴]。

以下项目切换。
- No.的显示从“P0~”变更为“P0、J0~”。
- 选择变量时所显示的范围被变更。
- 机械臂组在画面下方显示。

6
按[Group 0]。
显示机械臂组的列表,选择要使用的机械臂组编号。
以下示例中选择了[Group 1]。

7
将机器人及附加轴向目标的位置移动。
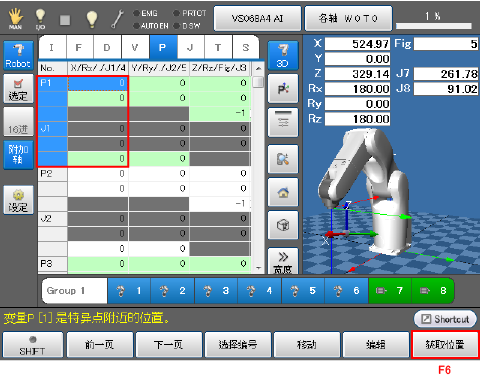
8
选择要读取位置的变量,按[F6 位置输入]。
以下示例中选择了“P1、J1”。
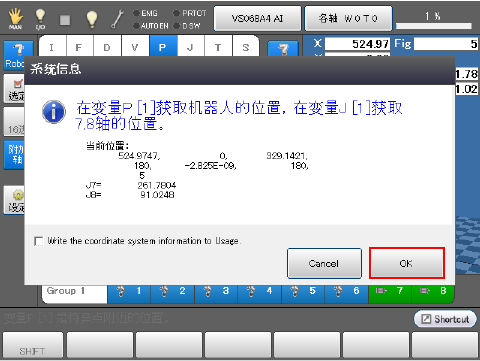
9
将显示是否读取变量的系统信息,如果正确,则按[OK]。
按[Cancel]则不读取变量。
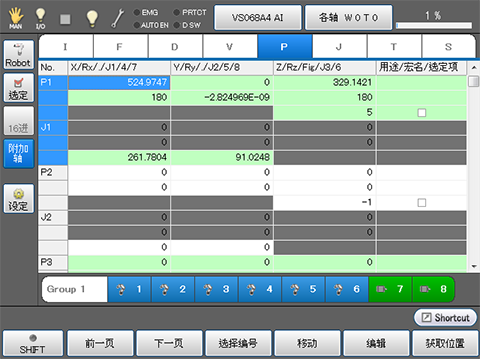
读取的变量如下显示。
ID : 4897