
ID : 4457
臂建模
“臂建模”是在“机械臂3D视图”上配置工具、工件、周围设备等的3D数据。
工具、工件、周围设备的数据中不仅可读取现有的数据,还可读取在外部创建的3D数据。
项目说明
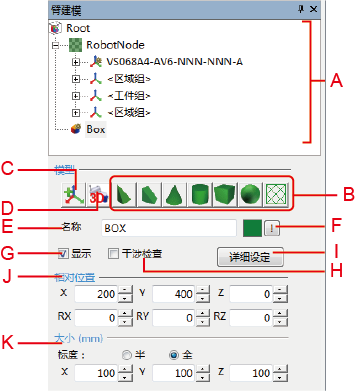
A:对象树
分层显示“机械臂3D视图”上配置的对象。
在“对象树”领域内右击时,显示以下菜单。
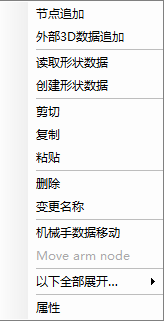
节点追加
在选择的对象下追加节点。
外部3D数据追加
使用在外部创建的3D数据追加对象。
读取形状数据
读取现有的形状数据。
创建形状数据
输出选择的对象形状数据。
剪切
将选择的对象复制到剪切板上,并删除该对象。
复制
将选择的对象复制到剪切板上。
粘贴
将剪切板上的对象作为选择对象的子对象粘贴。
删除
删除选择的节点或对象。
变更名称
变更选择的节点或对象的名称。
机械手数据移动
将机器人作为选择的节点或子对象移动。
移动对象为包含对象树上机器人的RobotNode对象全体。
移动机械臂
作为选择了机械臂的节点或子对象移动。
以下全部…
将展开/折叠、显示/非显示、有/无干扰检查应用于以下选择的所有节点对象。
属性
显示选择对象的属性。
B:追加按钮
追加对象。追加对象形状的按钮有7种。
C:“Node”按钮
追加节点。
D:“外部”按钮
读取在外部创建的3D数据。
E:“名称”
显示在对象树上选择的对象的名称。
F:“颜色”
设定在对象树上选择的对象的颜色。
G:“显示”选框
将在对象树上选择的对象显示在“机械臂3D视图”上时,勾选此选框。
H:“干扰”选框
将在对象树上选择的对象作为干扰检查时的对象时,勾选此选框。
I:“详细设定”按钮
显示在对象树上选择的对象的“模型详细设定”对话框。
J:“相対位置”
设定在对象树上选择的对象的相对位置。
- X、Y、Z
设定对象相对位置的X、Y、Z。 设定单位为毫米。 - RX、RY、RZ
设定对象相对位置的X、Y、Z轴中心的旋转角度。 设定单位为度。
K:“大小”
设定在对象树上选择的对象的大小。
- X、Y、Z
设定X、Y、Z轴方向的大小。 设定单位为毫米。
选择“半”时为到各轴中心的大小,选择“全”时为全长大小。
- 选择的对象为导入的3D数据时,指定为“倍率”。将3D数据的原大小设为1倍,根据倍率变更大小。
- 无法编辑导入的3D对象。
- 在大小中输入负值(-)时进行翻转。
ID : 4457