
ID : 4458
机械臂操作
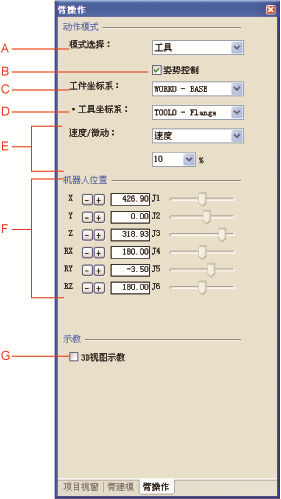
在各轴上操作显示在“机械臂3D视图”上的机器人的机械臂。
项目说明
A:模式选择
选择动作模式。
- 各轴:操作各轴。
- XY-直交:按照选择的工件坐标移动。RX、RY、RZ在以工具原点为中心的工件坐标轴周围旋转。
- 工具:按照选择的工具坐标移动。RX、RY、RZ在以工具原点为中心的工具坐标轴周围旋转。
B:姿势控制
打开、关闭X-Y、TOOL模式动作时的姿势控制功能。
C:工件坐标系
选择工件坐标。
D:工具坐标系
选择工具坐标。
E:速度/微动
选择机器人的运行方法。
- 速度:按压-/+按钮时,按照指定速度连续移动
- 微动: 每次按压-/+按钮时,都按照指定的移动量单位移动。
F:“位置移动”按钮
按照选择的“机械臂3D视图”所显示的机器人的动作模式移动。
G:“3D视图示教”
单击机械臂3D视图视窗内的对象时,可对正对面的姿势进行教导。
ID : 4458