
ID : 4456
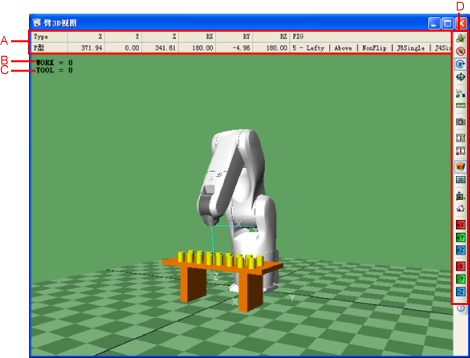
机械臂3D视图
通过3D显示机器人。
可确认机器人当前位置和动作范围,或者配置障碍物等对象,检查对周围设备的干扰。
项目说明
A:当前位置显示
通过变量(P型、J型、T型、J-EX型)的值显示机器人的当前位置。
可通过“机械臂”菜单的“当前位置显示”切换“当前位置显示”。
B:工件编号
显示当前工件编号。
可通过“机械臂”菜单的“工件坐标系监视器”来切换是否显示“工件坐标”。
C:工具编号
显示当前工具编号。
可通过“机械臂”菜单的“工具坐标系监视器”来切换是否显示“工具坐标”。
D:机械臂3D视图操作用工具栏

D-1:旋转
通过鼠标操作在画面中心旋转视点。
D-2:视点固定
在当前位置上固定视点。
D-3:旋转:Z轴周围
通过鼠标操作在Z轴周围旋转视点。(默认设定)
D-4:旋转:画面直交
在水平/垂直方向旋转视点。
D-5:3D视图教导
通过单击对象进行教导。
D-6:2点之间距离的测量
测量单击的2点之间的距离。
测量结果显示在输出视窗上。
D-7:截屏
将截屏保存到文件。
D-8:录像设定
进行录像时的动画压缩设定。
D-9:录像开始/停止
开始及停止录像。
D-10:3D显示
将画面切换至3D(透视投影)模式。
D-11:2D显示
将画面切换至2D(平行投影)模式。
D-12:原点中心
将基准原点移动到画面中心并显示。
D-13:全体显示
将对象全体切换至显示的大小。
D-14:视点切换(+X)
通过+X方向的视点显示画面。
D-15:视点切换(+Y)
通过+Y方向的视点显示画面。
D-16:视点切换(+Z)
通过+Z方向的视点显示画面。
D-17:视点切换(-X)
通过-X方向的视点显示画面。
D-18:视点切换(-Y)
通过-Y方向的视点显示画面。
D-19:视点切换(-Z)
通过-Z方向的视点显示画面。
D-20:操作帮助
在画面右上方显示操作方法。
使用鼠标进行视点操作
- 旋转:左侧拖动
- 摇摄:按住左右两侧拖动
- 缩放:右侧拖动
使用鼠标进行机器人、对象操作
选择:左击
- 将对象视点移动到画面中心:Shift+左击
- 在整个画面上显示对象:Alt+左击
移动:Ctrl+左击
- 直线移动:左侧拖动坐标轴
- 旋转:Ctrl+左侧拖动坐标轴
ID : 4456