
ID : 3414
使用双臂控制功能时的编程
在此针对编程的内容,分下述项目做了说明。
传感器跟踪的编程示例
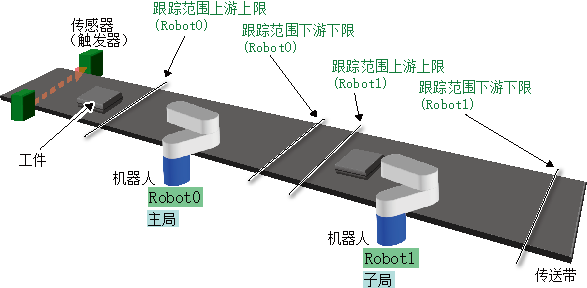
分析下图那样的系统的编程。假设工件的大小可在跟踪范围内容纳下。
作为整体构成,可以考虑下图那样的构成。
(下图记载的文件名是一个例子。可由用户任意命名。)
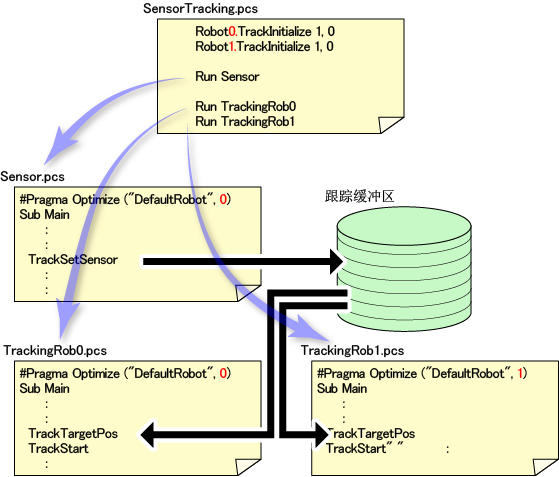
下表表示各程序文件的具体例子(示例程序)和内容的解说。
有下述的前提条件。
- 将传送带的传送带编号设为1。
- 来自传感器的触发器信号被接在I/O端口编号48上,通过上升沿检测。
|
程序名 (示例程序) |
解说 |
|---|---|
|
这是初始化传送带跟踪系统,启动其他3个程序的程序。 针对Robot0和Robot1二者实施初始化。 针对指令的机器人名称(Robot0/Robot1)的指定方法有2种。在示例程序中,在初始化指令的“TrackInitialize”的开头设置了“Robot0.”及“Robot1.”。 |
|
|
这是检测工件位置,向跟踪缓冲区登录的程序。 向跟踪缓冲区登录是主局的职责。对于这个例子的情形,由于Robot0是主局,因此作为Robot0的程序描述。 在示例程序中,通过在程序开头描述下述的1行,作为Robot0的程序。 |
|
|
这是从跟踪缓冲区读出工件的位置,使Robot0执行跟踪和挑选动作的程序。 在示例程序中,通过在程序开头描述下述的1行,作为Robot0的程序。 |
|
|
这是从跟踪缓冲区读出工件的位置,使Robot1执行跟踪和挑选动作的程序。 在示例程序中,通过在程序开头描述下述的1行,作为Robot1的程序。 |
有关机器人名称(Robot0/Robot1)的指定方法的详细内容,请参照“预备知识(主局与子局的概念)”的“向跟踪缓冲器登录数据”。
视觉跟踪的编程示例
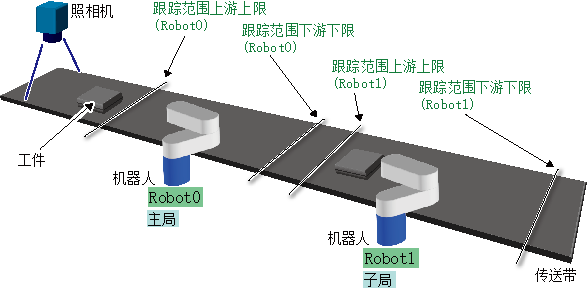
分析下图那样的系统的编程。假设工件的大小可在跟踪范围内容纳下。
作为整体构成,可以考虑下图那样的构成。
(下图记载的文件名是一个例子。可由用户任意命名。)
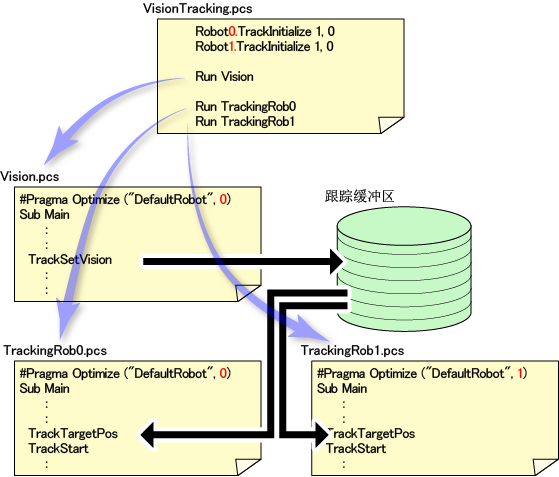
下表表示各程序文件的具体例子(示例程序)和内容的解说。
有下述的前提条件。
- 将传送带的传送带编号设为1。
|
程序名 (示例程序) |
解说 |
|---|---|
|
这是初始化传送带跟踪系统,启动其他3个程序的程序。 针对Robot0和Robot1二者实施初始化。 针对指令的机器人名称(Robot0/Robot1)的指定方法有2种。在示例程序中,在初始化指令的“TrackInitialize”的开头设置了“Robot0.”及“Robot1.”。 |
|
|
这是检测工件位置,向跟踪缓冲区登录的程序。 向跟踪缓冲区登录是主局的职责。对于这个例子的情形,由于Robot0是主局,因此作为Robot0的程序描述。 在示例程序中,通过在程序开头描述下述的1行,作为Robot0的程序。 |
|
|
这是从跟踪缓冲区读出工件的位置,使Robot0执行跟踪和挑选动作的程序。 在示例程序中,通过在程序开头描述下述的1行,作为Robot0的程序。 |
|
|
这是从跟踪缓冲区读出工件的位置,使Robot1执行跟踪和挑选动作的程序。 在示例程序中,通过在程序开头描述下述的1行,作为Robot1的程序。 |
有关机器人名称(Robot0/Robot1)的指定方法的详细内容,请参照“预备知识(主局与子局的概念)”的“向跟踪缓冲器登录数据”。
其他编程示例
作为传送带跟踪的编程示例,有“针对长条工件的编程示例”、“跟踪的自由曲线插补的编程示例”等。这些是使用1台机器人时的例子,但是如果进行Robot0、Robot1的指定,也可部分挪用。也请参考位于“编程”下层的内容(上述内容等)。
ID : 3414