
ID : 18026
预备知识(主局与子局的概念)
在此针对预备知识,分下述项目做了说明。
关于传送带的信息共享
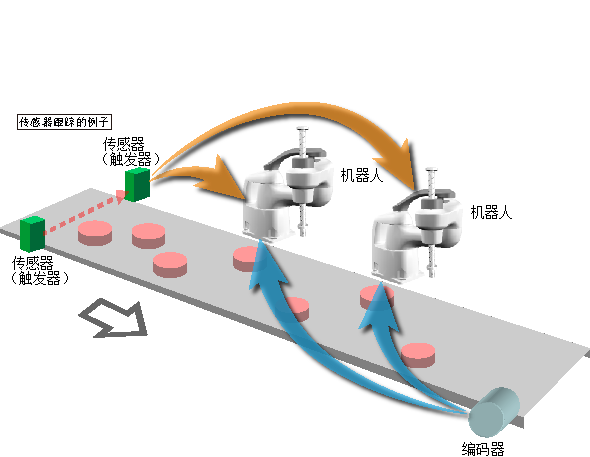
用多台机器人挑选在1台传送带上流动的工件时,需要各机器人共享传送带的信息。
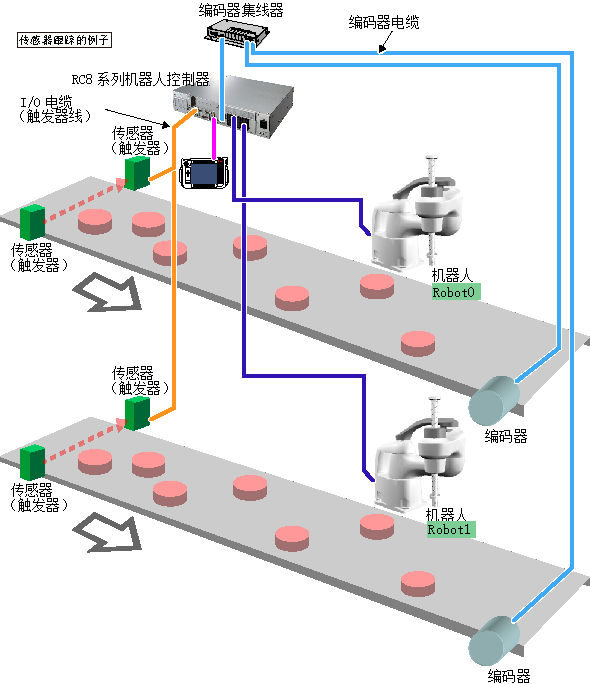
例如,分析用2台机器人挑选在1台传送带上流动的工件的情形。
不使用双臂控制功能时
不使用双臂控制功能时,需要2台机器人控制器。
此时,需要决定管理传送带的编码器和触发器的机器人控制器。将这个机器人控制器叫做“主局控制器”。使另一个机器人控制器共享主局控制器的传送带信息,基于这一立场,将其叫做“子局控制器”。
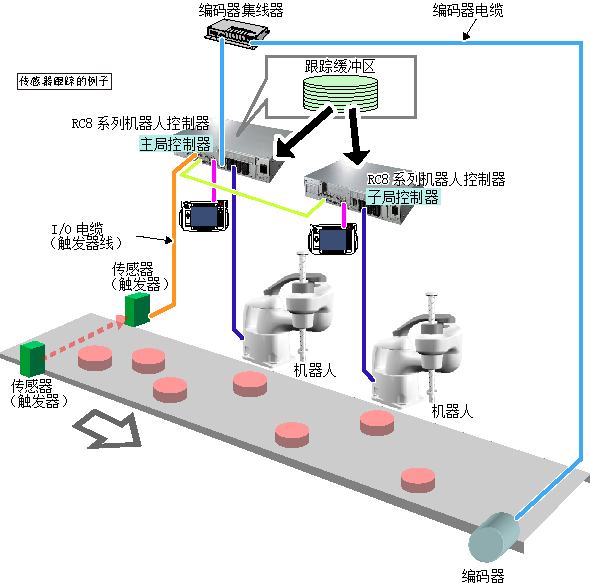
由于主局控制器管理传送带的编码器和触发器,需要实施显示内容。
| 编码器的设定 | 设定连接了编码器的轴编号等。 |
|---|---|
| 触发器的设定 | 连接了触发器的I/O的端口编号等。 |
| 向跟踪缓冲器登录数据 | 在输入了触发器信号的时机,将编码器的数据等登录到主局控制器内的跟踪缓冲区。 |
由主局控制器和子局控制器共享跟踪缓冲区的数据,通过2台机器人实现传送带跟踪。
使用双臂控制功能时
使用双臂控制功能时,机器人控制器为1台,因此将主局和子局的职责分配给机器人。
通过双臂控制功能,对各机器人分配Robot0及Robot1的机器人名称。因此,将Robot0和Robot1中的某一个设为主局。
例如,假设将Robot0设为主局。针对Robot0执行主局必须实施的3个内容。
通过多功能教导器进行编码器的设定和触发器的设定。使用双臂控制功能时,多功能教导器为1台,因此需要切换进行Robot0和Robot1中的哪一个的设定。
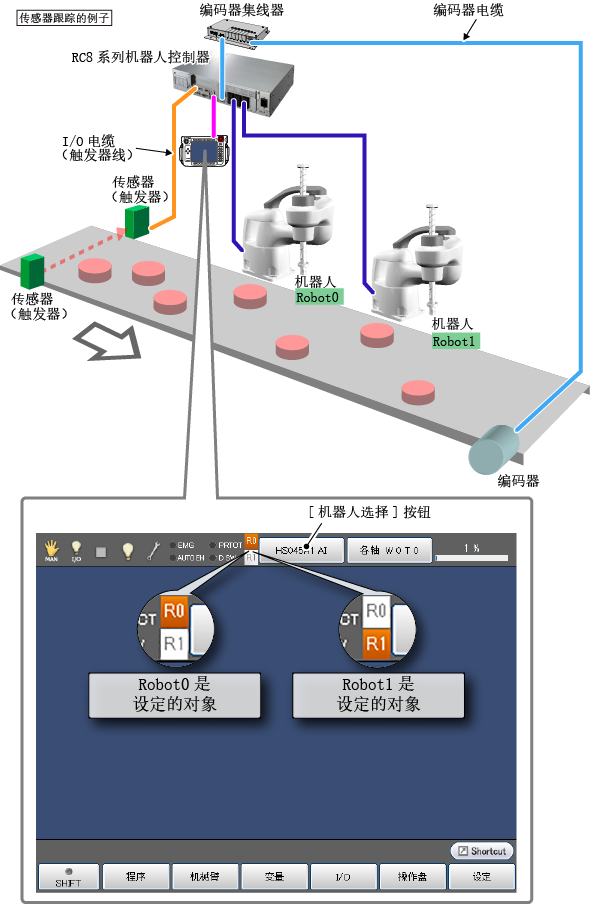
通过[机器人选择]按钮,进行Robot0和Robot1的切换。如果切换为Robot0,在[机器人选择]按钮左边的图标的“R0”被做上橙色标记。在该状态进行编码器的设定和触发器的设定。
将Robot0设为主局时,将Robot1设为子局。子局也有要设定的项目。进行子局(Robot1)的设定时,通过[机器人选择]按钮切换为Robot1后进行。
向跟踪缓冲器登录数据
对于向跟踪缓冲器登录数据,通过程序进行。使用双臂控制功能时,需要指定对Robot0和Robot1中的哪一个下达的指令。
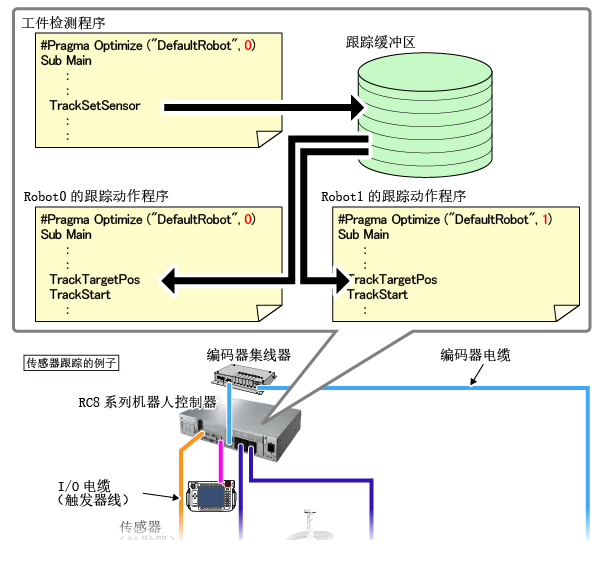
将Robot0设为主局时,在向跟踪缓冲区登录的指令“TrackSetSensor”的开头,设置“”Robot0.(参照下图)。在这里,如果将“Robot1.”设置在“TrackSetSensor”的开头执行,由于Robot1不是主局,将出错。
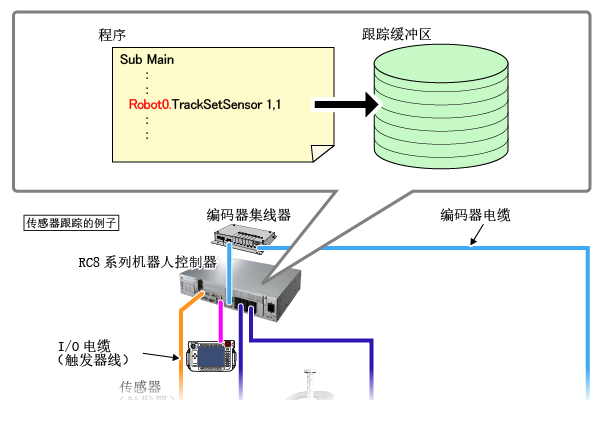
“TrackSetSensor”是传感器跟踪用指令。视觉跟踪使用“TrackSetVision”。
除了“TrackSetSensor”外,还有别的指令也必须设置机器人名称(“Robot0.”、“Robot1.”),如果分别设置,作业效率有时会变差。此时,使用预处理“#Pragma Optimize ("DefaultRobot", N)”。
对于必须设置机器人名称的指令的种类,与协调功能的规格基本相同。请参照协调功能指南的“指令”内的“指定机器人使用的指令”。
在预处理“#Pragma Optimize ("DefaultRobot", N)”的“N”中指定机器人名称的编号。Robot0的机器人名称指定“0”,Robot1的机器人名称指定“1”。
例如,在程序的开头进行下述那样的描述。
#Pragma Optimize ("DefaultRobot", 0)此时,针对必须设置机器人名称的指令,尤其是对于没有设置机器人名称的指令,被当作设置了“Robot0.”的指令处理。
例如,描述如下。
#Pragma Optimize ("DefaultRobot", 0)
TrackSetSensor 1, 1执行了上述程序时,与执行了下述程序的情形相同。
Robot0.TrackSetSensor 1, 1在传送带跟踪的编程中,在向跟踪缓冲区登录的处理之外,需要创建跟踪动作。如果使用预处理“#Pragma Optimize ("DefaultRobot", N)”创建这些程序,如下图所示。
2台机器人分别对别的传送带进行传送带跟踪时
如果使用双臂控制功能,2台机器人分别针对别的传送带进行传送带跟踪时,不需要共享编码器和触发器。因此,将Robot0和Robot1二者都设为主局(子局分别为0台)。编码器的设定以及触发器的设定、向跟踪缓冲器登录数据分别由Robot0和Robot1进行。
在此必须注意的是连接了编码器的轴编号的设定。编码器的设定是主局的职责。由于Robot0和Robot1各自都是主局,也分别进行编码器的设定。
例如,在7轴上由Robot0使用的编码器假设连接了在8轴上由Robot1使用的编码器。
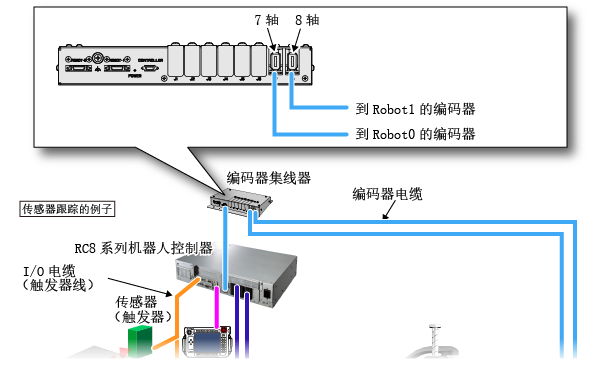

在电机设定中如上图所示,7轴的设定针对Robot0进行,8轴的设定针对Robot1进行。
如果针对Robot0设定7轴和8轴,不会正常动作。如果针对Robot1设定7轴和8轴,也不会正常动作。
另外,针对相同的轴,请避免Robot0和Robot1的“设定轴有效无效”二者都是“有效”(也包括“仅编码器有效”)的设定。对于上图的情形,在7轴的“设定轴有效无效”中Robot0的设定为“仅编码器有效”,因此请将Robot1的7轴的设定设为“无效”。
除了电机设定外,关于针对传送带的编码器的轴编号、触发器的设定、向跟踪缓冲器登录数据,也需要正确区分设定的对象是Robot0还是Robot1。
关于子局的添加
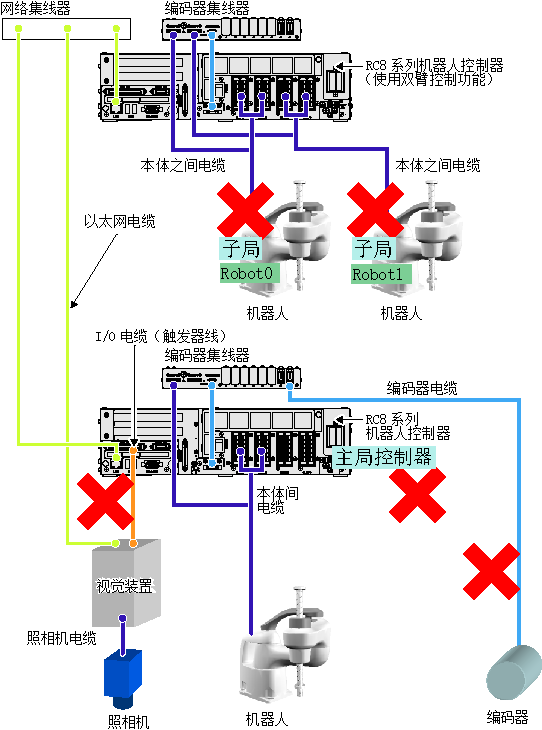
如上所述,将Robot0、Robot1都设为主局进行传送带跟踪时,不能对二者的主局将别的机器人控制器作为子局1台1台地添加。只能对其中的某一个的主局将机器人控制器作为子局添加。
由3台以上的机器人共享传送带时
由3台以上的机器人共享传送带时,只能对使用双臂控制功能的机器人控制器所控制的机器人分配主局。不能将不使用双臂控制功能的机器人控制器设为主局控制器。
ID : 18026