
ID : 2676
作业动作的目标位置检查
开始跟踪动作时,当作业动作的目标位置在机器人的可动范围外时会发生错误。 使用TrackCurMotionRange指令可以检查作业动作的目标位置有无进入机器人的可动范围内。
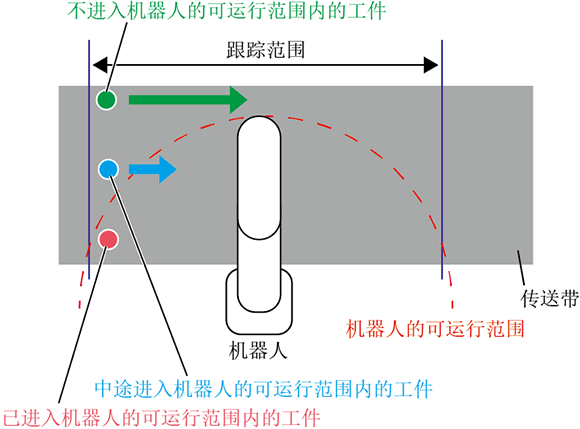
但是,如下图所示,有时目标位置可能一次也不会进入机器人的可动范围内。
TrackMotionRange指令可以在跟踪对象工件位于跟踪范围内时,检查作业动作的目标位置的轨道上,有无能进入机器人的可动范围内的点。
此指令对Ver.2.11.*以上的版本有效。
作业动作的目标位置
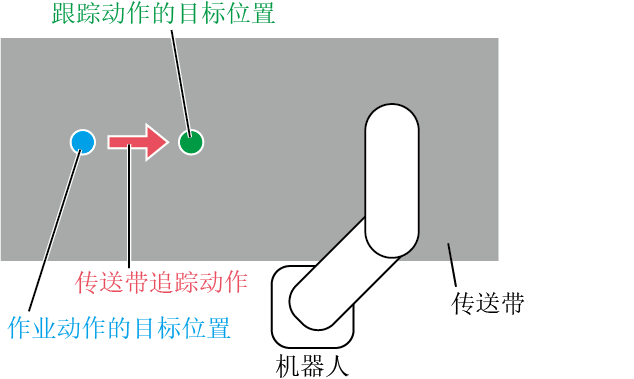
作业动作的目标位置,是假定跟踪动作开始时传送带已停止,计算“拾取跟踪对象工件的位置”及“将拾取的工件进行供给的位置”。
实际上传送带已经动作,因此根据作业动作的目标位置合成了传送带追踪动作后的位置,即为跟踪动作的目标位置。
ID : 2676