
ID : 3399
机器人3台、传送带N台的设置步骤
通过主局和子局(2台)分别进行公用的传送带的设定。
在此将使用双臂控制功能的机器人控制器叫做“双臂控制器”,将不使用双臂控制功能的控制器叫做“通常控制器”。
另外,以对设置的系统的条件做下述规定的情形为例,进行说明。
- 将双臂控制器的Robot0设为主局
- 将双臂控制器的Robot1与通常控制器设为子局
- 将编码器接在编码器集线器的7轴上
- 传送带编号使用1
- 假设双臂控制器的IP地址为192.168.0.1,通常控制器的IP地址为192.168.0.2。
实际进行设置时,请结合设置的系统的条件,进行各设定。
以下表示整体的设置步骤。
| 实施项目 | 概要 |
|---|---|
|
使用增设LAN板,进行主局与子局(通常控制器)之间的通信时,更改“组播.接口[IP Address]”这一参数的初始值。 |
|
|
2.主局的设定 (在双臂控制器上设定) |
|
|
(在双臂控制器上设定) |
|
|
(在通常控制器上设定) |
|
根据子局的台数、传送带的台数,受双臂控制器的CPU性能的影响,可能发挥不出足够的性能。此时,请减少子局的台数、传送带的台数,分离系统,探讨降低双臂控制器的CPU负荷。或者请探讨使用配备了高规格CPU的机器人控制器。
1.使用增设LAN板时的设定
使用增设LAN板,进行主局与子局(通常控制器)之间的通信时,需要更改“组播.接口[IP Address]”这一参数的初始值。详细内容请参照“使用增设的LAN板进行主局与子局之间的通信时”。
2.主局的设定(在双臂控制器上设定)
1
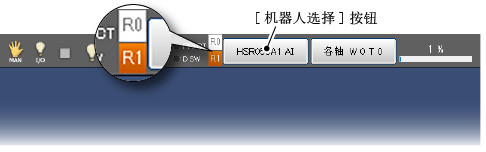
首先,将多功能教导器的设定对象切换为Robot0。
如果按[机器人选择]按钮,显示[机器人选择]视窗。从[机器人选择]列表选择Robot0(R0),按[OK]按钮。
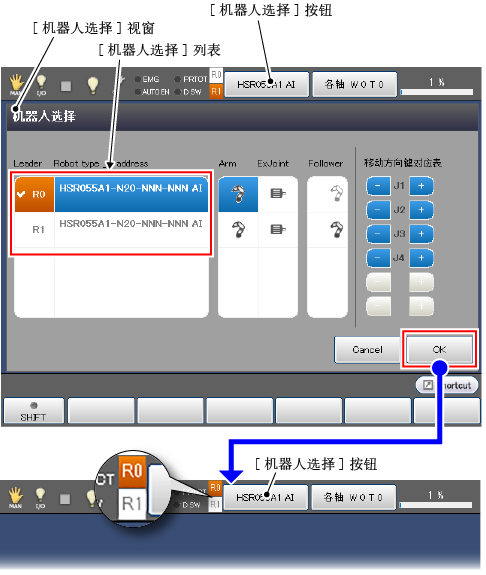
请确认在[机器人选择]按钮左边的图标的“R0”被做上橙色标记(参照上图)。
2
设定连接了编码器的轴。
如果将用户级别设为“维护”,按照以下的操作路径进行操作,显示下图的[电机设定]视窗。
操作路径[F2 机械臂]-[F12 保养]-[F10 轴设定]-[F6 电机设定] |
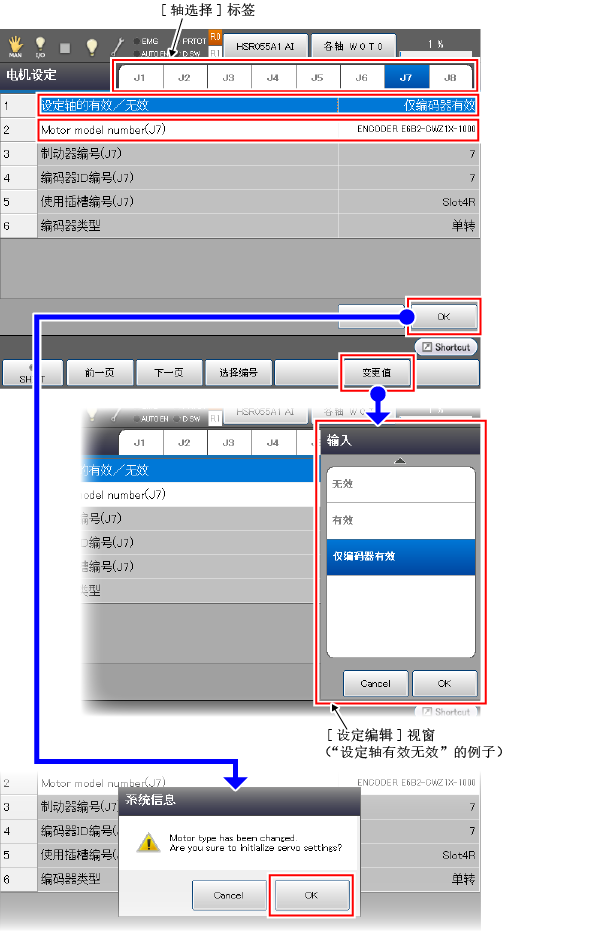
从[轴选择]标签选择轴编号(7轴时为“J7”)。显示7轴的电机设定参数,遵照下表的内容进行设定。
|
设定参数 (编号:参数名) |
设定值 |
|---|---|
| 1:设定轴有效无效 | 仅编码器有效 |
| 2:电机型式编号(J7) | ENCODER E6B2-CWZ1X-1000 |
设定方法是首先将光标对准各参数,按[F5 变更值]。显示[设定编辑]视窗,在此选择想设定的值,按[OK]按钮。
设定各参数后,按[电机设定]视窗的[OK]按钮。显示参数设定完成的系统消息,按[OK]按钮。
断开机器人控制器的电源前,请确认Robot1的7轴的“设定轴有效无效”为“无效”。确认方法是首先按[机器人选择],将多功能教导器的设定对象切换为“Robot1”。然后,参照上述内容,显示[电机设定]视窗,确认7轴的电机设定。
3
重新启动机器人控制器。
请断开机器人控制器的电源,然后接通电源。
在机器人控制器启动后,将多功能教导器的设定对象切换为Robot0。
4
将Robot0设为主局。
如果将用户级别设为“维护”,按照以下的操作路径进行操作,显示下图的[跟踪]视窗。
操作路径:[F10 跟踪] |
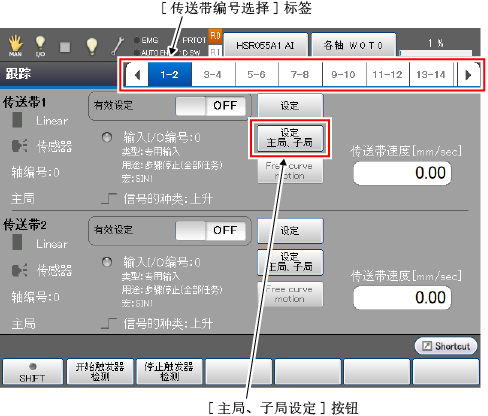
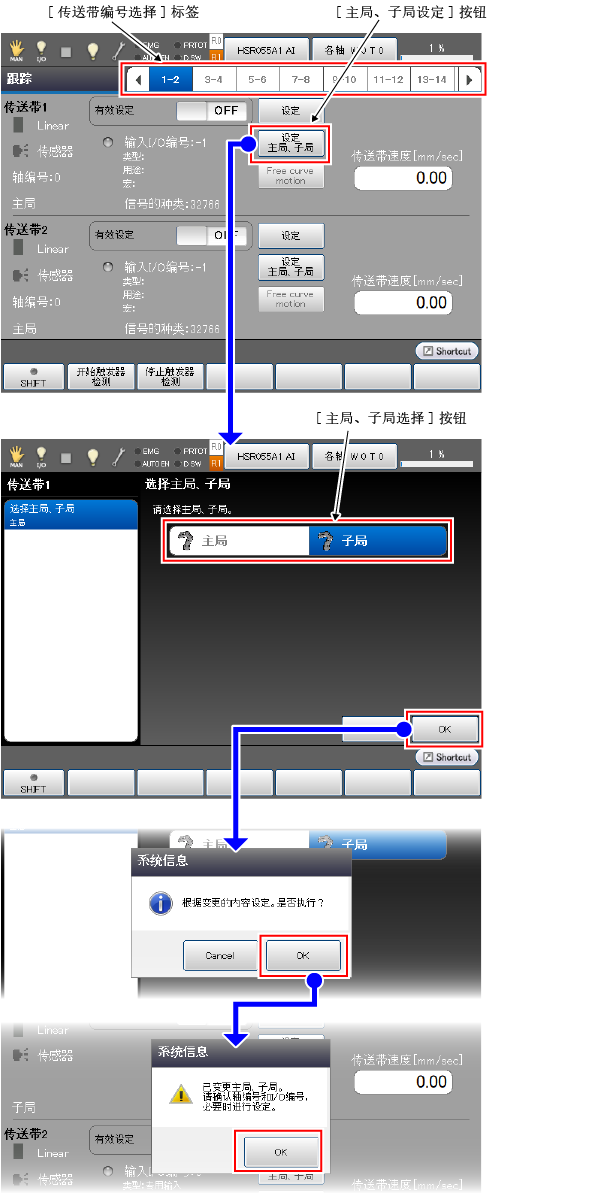
如果从[传送带编号选择]标签选择传送带编号1和2的标签(“1-2”),显示传送带编号1和2的传送带设定画面。然后,按传送带编号1的[主局·子局设定]按钮,使下图的[主局·子局选择]视窗显示出来。
在此遵照下表内容进行设定。
| 设定项目 | 设定值/设定方法 |
|---|---|
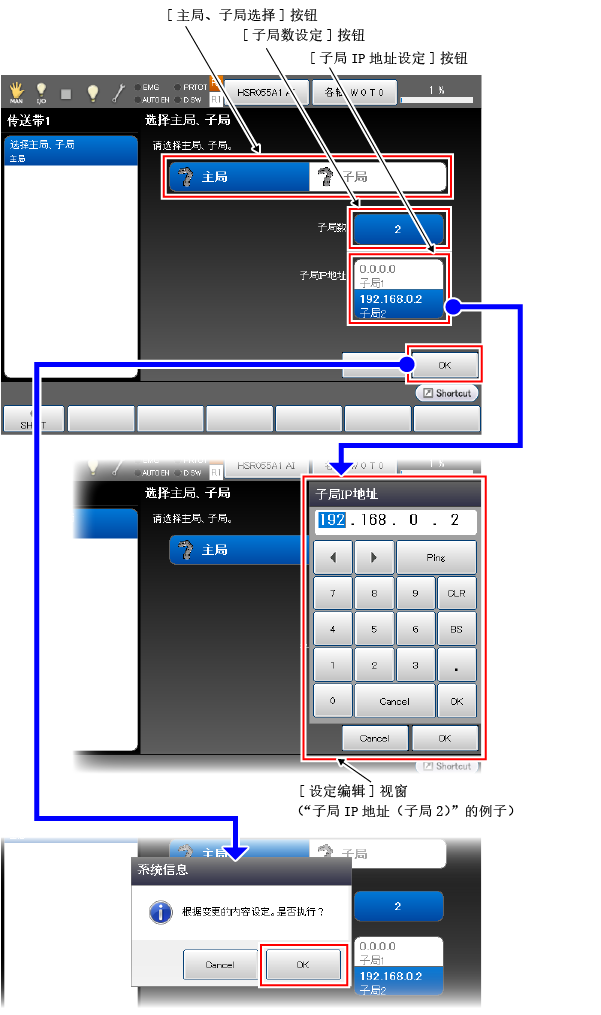
| 主局·子局选择 |
设定值:主局 |
|
设定方法:按[主局·子局选择]按钮的“主局”(“主局”被标记为蓝色)。 |
|
| 子局数 |
设定值:2 |
|
设定方法:按[子局数设定]按钮,从[设定编辑]视窗选择“1”后,按[设定编辑]视窗的[OK]按钮。 |
|
| 子局IP地址 |
设定值:
子局1以Robot1为对象,子局2以通常控制器为对象。 如果指定0.0.0.0,就是指定双臂控制功能的另一侧的机器人。在这个例子中,已经将Robot0设为主局,因此如果是另一侧的机器人,就是指定Robot1。 |
|
设定方法:按[子局IP地址设定]按钮中的子局1或者子局2,在[设定编辑]视窗输入IP地址后,按[设定编辑]视窗的[OK]按钮。 |
设定各设定项目后,按[主局·子局选择]视窗的[OK]按钮。显示系统消息,如果按[OK]按钮,返回[跟踪]视窗。
针对在子局中设定的传送带改为主局时,如果按[主局·子局选择]视窗的[OK]按钮,将出现2次系统消息。如果2次都按[OK]按钮,返回[跟踪]视窗。
5
进行在传送带上使用的硬件的设定和连接确认、传送带与机器人(Robot0)的校准。
步骤与只使用1台机器人时相同。请参照“硬件的选择”、“硬件的连接确认”、“校准”。但是,多功能教导器的设定对象请在维持Robot0的情况下实施。
6
使用多台传送带时,有多少台传送带,就实施STEP1至STEP5的作业多少次。
3.子局(Robot1)的设定(在双臂控制器上设定)
1
首先,将多功能教导器的设定对象切换为Robot1。
请按[机器人选择]按钮进行切换(请参考“2.主局的设定”的“STEP1”)。
请确认在[机器人选择]按钮左边的图标的“R1”被做上橙色标记(参照下图)。
2
将Robot1设为子局。
如果将用户级别设为“维护”,按照以下的操作路径进行操作,显示下图的[跟踪]视窗。
操作路径:[F10 跟踪] |
从[传送带编号选择]标签选择传送带编号1和2的标签(“1-2”),按传送带编号1的[主局·子局设定]按钮。
显示[主局·子局选择]视窗,按[主局·子局选择]按钮的“子局”(“子局”被标记为蓝色)。
然后,如果按[主局·子局选择]视窗的[OK]按钮,显示系统消息,按[OK]按钮。进而显示系统消息,如果按[OK]按钮,返回[跟踪]视窗。
3
进行与主局的连接确认。
按位于[跟踪]视窗内的传送带编号1的[设定]按钮。
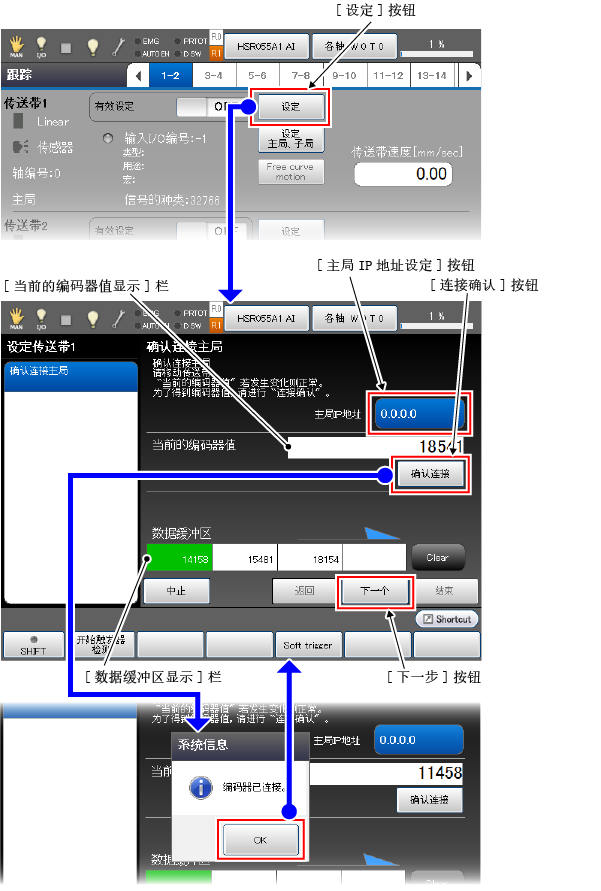
下述[与主局的连接确认]视窗。
在该视窗实施下表的内容。
| 实施项目/实施步骤 | 实施内容 |
|---|---|
| 1.主局IP地址的设定 |
设定值:0.0.0.0 (如果指定0.0.0.0,就是指定主局中设定的机器人。在这个例子中,就是指定Robot0。) |
|
设定方法:按[主局IP地址设定]按钮,从[设定编辑]视窗输入“0.0.0.0”后,按[设定编辑]视窗的[OK]按钮。 |
|
| 2.与主局的连接确认 |
按[连接确认]按钮,确认显示表示连接了编码器的系统消息。如果按系统消息的[OK]按钮,返回[与主局的连接确认]视窗。 |
| 3.编码器值得取得确认 |
使设定对象的传送带动作(在这个例子中,是传送带编号1的传送带)。每次输入触发信号,就从[数据缓冲区显示]栏的最左边的框起,依次显示编码器值。 如果在[数据缓冲区显示]栏的各框显示的编码器值各不相同,就是正常的。 进而确认[当前的编码器值]栏的编码器值被实时更新。 |
全部实施上表的内容后,按[下一步]按钮。显示[传送带形状选择]视窗。
4
从[传送带形状选择]视窗进行在传送带上使用的硬件的设定(传送带·装置的选择)以及传送带与机器人(Robot1)的校准。
步骤与只使用1台机器人时相同。请参照“传送带·装置的选择”、“校准”。但是,多功能教导器的设定对象请在维持Robot1的情况下实施。
在子局上,由于不需要下述内容,因此不实施。
- 编码器的轴编号的设定
- I/O设定
- 硬件的连接确认
5
使用多台传送带时,有多少台传送带,就实施STEP1至STEP4的作业多少次。
4.子局(通常控制器)的设定(在通常控制器上设定)
1
将通常控制器设为子局。
如果将用户级别设为“维护”,按照以下的操作路径进行操作,显示下图的[跟踪]视窗。
操作路径:[F10 跟踪] |
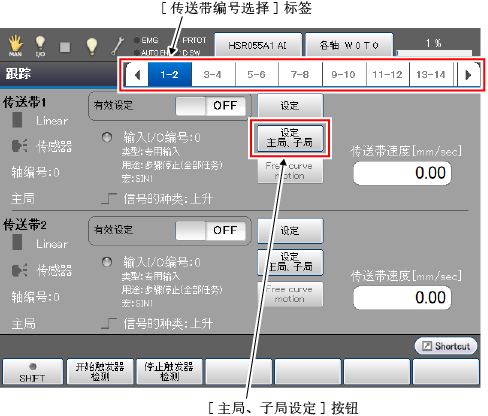
如果从[传送带编号选择]标签选择传送带编号1和2的标签(“1-2”),显示传送带编号1和2的传送带设定画面。然后,按传送带编号1的[主局·子局设定]按钮,使下图的[主局·子局选择]视窗显示出来。
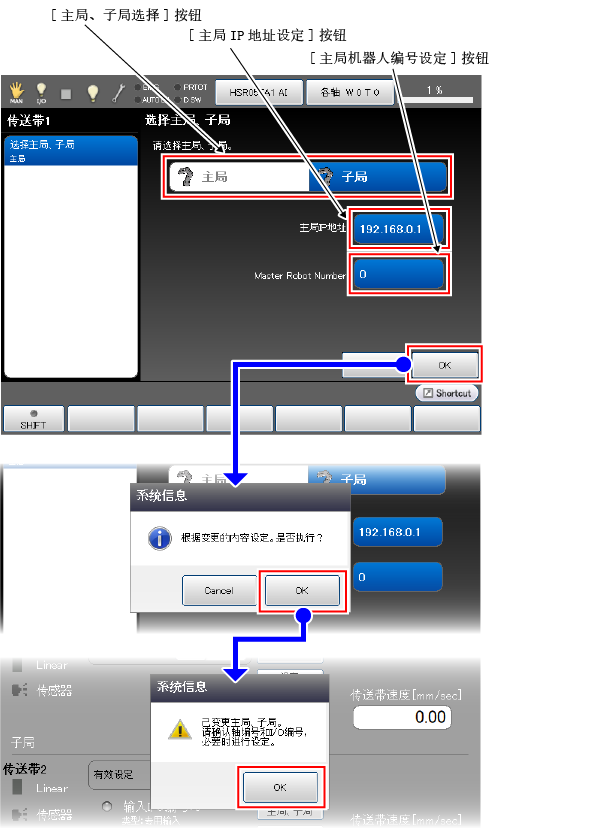
在此遵照下表内容进行设定。
| 设定项目 | 设定值/设定方法 |
|---|---|
| 主局·子局选择 |
设定值:子局 |
|
设定方法:按[主局·子局选择]按钮的“子局”(“子局”被标记为蓝色)。 |
|
| 主局IP地址 |
设定值:192.168.0.1 |
|
设定方法:按[主局IP地址设定]按钮,从[设定编辑]视窗输入IP地址后,按[设定编辑]视窗的[OK]按钮。 |
|
| 主局机器人编号 |
设定值:0 (指定双臂控制器的Robot0和Robot1中的哪一个是主局。在这个例子中,由于Robot0是主局,因此设定值为0。) |
|
设定方法:按[主局机器人编号设定]按钮,从[设定编辑]视窗输入“0”后,按[设定编辑]视窗的[OK]按钮。 |
设定各设定项目后,按[主局·子局选择]视窗的[OK]按钮。显示系统消息,按[OK]按钮。进而显示系统消息,如果按[OK]按钮,返回[跟踪]视窗。
2
进行与主局的连接确认。
按位于[跟踪]视窗内的传送带编号1的[设定]按钮。
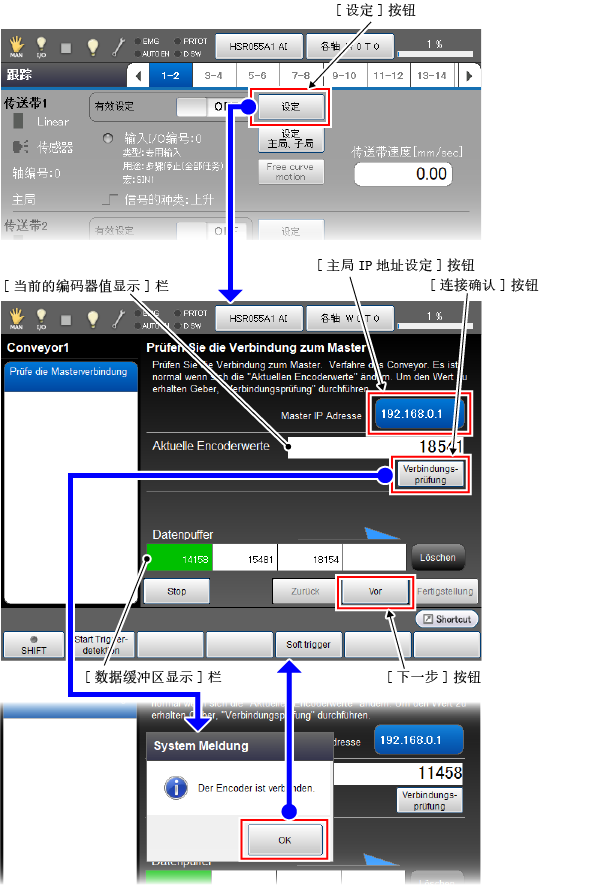
下述[与主局的连接确认]视窗。
在该视窗实施下表的内容。
| 实施项目/实施步骤 | 实施内容 |
|---|---|
| 1.主局IP地址的设定 |
设定值:192.168.0.1 |
|
设定方法:按[主局IP地址设定]按钮,从[设定编辑]视窗输入“192.168.0.1”后,按[设定编辑]视窗的[OK]按钮。 |
|
| 2.与主局的连接确认 |
按[连接确认]按钮,确认显示表示连接了编码器的系统消息。如果按系统消息的[OK]按钮,返回[与主局的连接确认]视窗。 |
| 3.编码器值得取得确认 |
使设定对象的传送带动作(在这个例子中,是传送带编号1的传送带)。每次输入触发信号,就从[数据缓冲区显示]栏的最左边的框起,依次显示编码器值。 如果在[数据缓冲区显示]栏的各框显示的编码器值各不相同,就是正常的。 进而确认[当前的编码器值]栏的编码器值被实时更新。 |
全部实施上表的内容后,按[下一步]按钮。显示[传送带形状选择]视窗。
3
从[传送带形状选择]视窗进行在传送带上使用的硬件的设定(传送带·装置的选择)以及传送带与机器人(通常控制器的机器人)的校准。
步骤与只使用1台机器人时相同。请参照“传送带·装置的选择”、“校准”。
在子局上,由于不需要下述内容,因此不实施。
- 编码器的轴编号的设定
- I/O设定
- 硬件的连接确认
4
使用多台传送带时,有多少台传送带,就实施STEP1至STEP3的作业多少次。
ID : 3399