
ID : 3372
双臂的操作菜单的显示
操作路径:基本画面-[F6 设定]-[F10 双臂]
显示进行双臂的有效无效设定,并从写入了CALSET数据的USB进行数据读入的操作菜单。
如果按[F10 双臂],显示以下那样的[双臂设定]视窗。
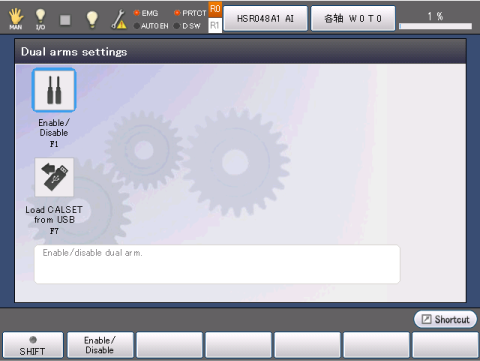
| 可使用的功能键 | |
|---|---|
| [F1 有效无效设定] |
切换双臂的有效无效。 如果设为无效,可像使用通常的单独机器人时一样,只使用Robot0。 按该按钮显示系统消息,按[OK]则切换。 详细内容请参照双臂控制功能使用说明书的“双臂控制功能特有的内容”的“双臂控制功能无效设定”。 |
| [F7 读入CALSET USB] |
从与成为Robot1的机器人包装在一起的USB存储器,向控制器读入CALSET值和RANG值。 将相应的USB存储器插入RC8A,按该按钮。显示系统消息,按[OK]。 详细内容请参照双臂控制功能使用说明书的“HSR/HSA1的组合”的“3.向RC8A读入CALSET值和RANG值”。 |
ID : 3372