
ID : 3371
协调功能的设定
操作路径:基本画面-[F6 设定]-[F9 协调]
进行协调功能所需的主局控制器的设定及子局控制器的IP地址的登录。
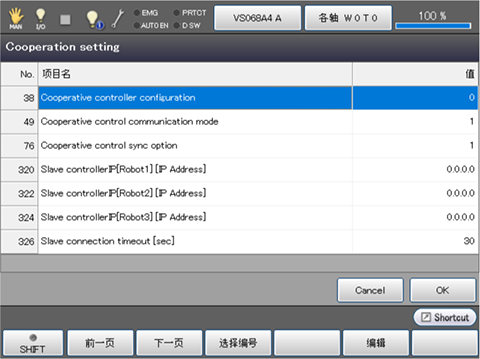
如果按[F9 协调],显示以下那样的[协调设定]视窗。
| 可使用的功能键 | |
|---|---|
| [F1 前一页] |
显示当前显示项目的上一页。 |
| [F2 下一页] | 显示当前显示项目的下一页。 |
| [F3 选择编号] | 显示数字键。 如果使用数字键输入项目编号后按压[OK],则移至所需的项目编号。所选择的项目反衬显示。 也可通过多功能教导器的漫步旋钮和上下方向光标键进行选择。 |
| [F5 编辑] |
选择要变更的参数后,如果按压[编辑],则显示输入画面。 选择项目,按压输入画面上的[OK]变更内容。 按[协调设定]视窗的[OK],确定已更改的值。 |
显示参数
| No. | 项目名 | 范围 | 内容 | ||||
|---|---|---|---|---|---|---|---|
| 38 | 协调控制器设定 | 0~4 | 设为协调功能的主局控制器或者子局控制器。
|
||||
| 49 | 协调控制通信模式 | 0、1 | 设定机器人控制器间的通信方法。针对通信方法的设定值如下所示。
当机器人控制器的软件版本为2.3.*以上时,1:将“并用Ethernet与EtherCAT”设为默认。 只使用Ethernet时,请将协调控制通信模式的值改为“0”。 |
||||
| 320,322,324 | 子局控制器的IP | - | 输入子局控制器IP的IP地址。 输入“0.0.0.0”以后的子局控制器无效。 |
||||
| 326 | 子局控制器启动等待时间的设定 | - | 主局控制器在电源启动时试图与子局控制器建立通信。 然而,从开始建立后时隔一段时间依然没有建立通信时,将发生错误。 为了避免发生错误,请尽可能对准主局控制器与子局控制器的电源启动时机。 如果依然发生错误,请增加该参数值。 初始值为30sec。 |
有关设定方法,请参照协调功能指南的“主局控制器协调设定”及“子局控制器的协调设定”。
ID : 3371