
ID : 3062
负载重心惯量自动测量
这里以HSR、HSA1机器人为例来说明步骤。
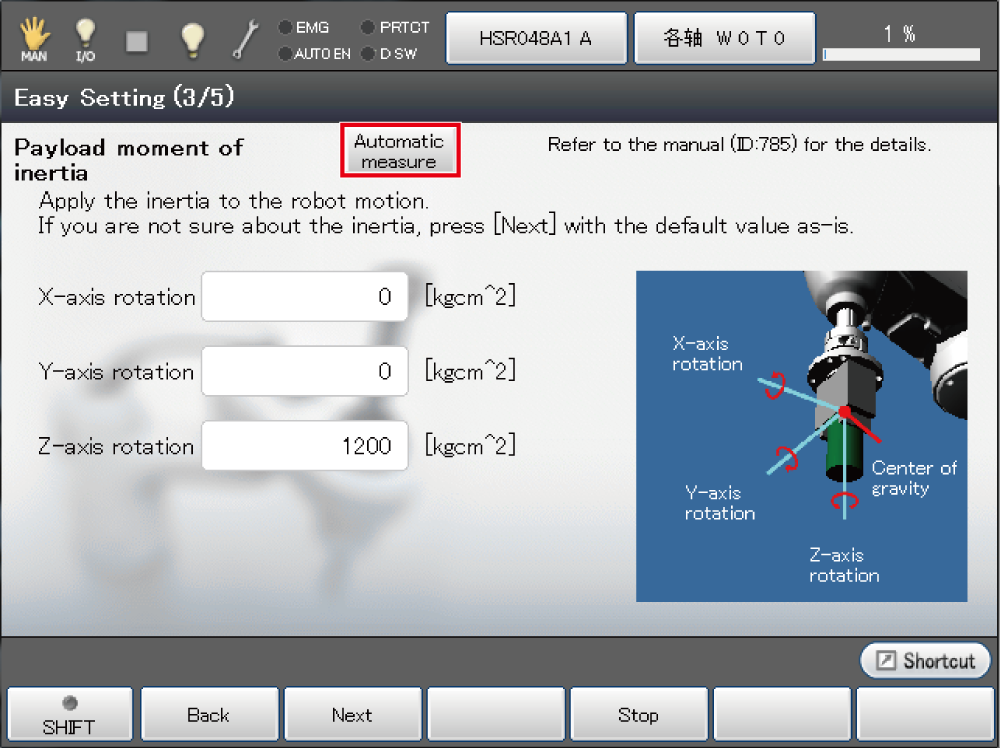
请先设定“前端负载质量”、“负载重心位置”。
1
按[简单设定]-[负载重心惯量]设定画面上的[自动测量]按钮。
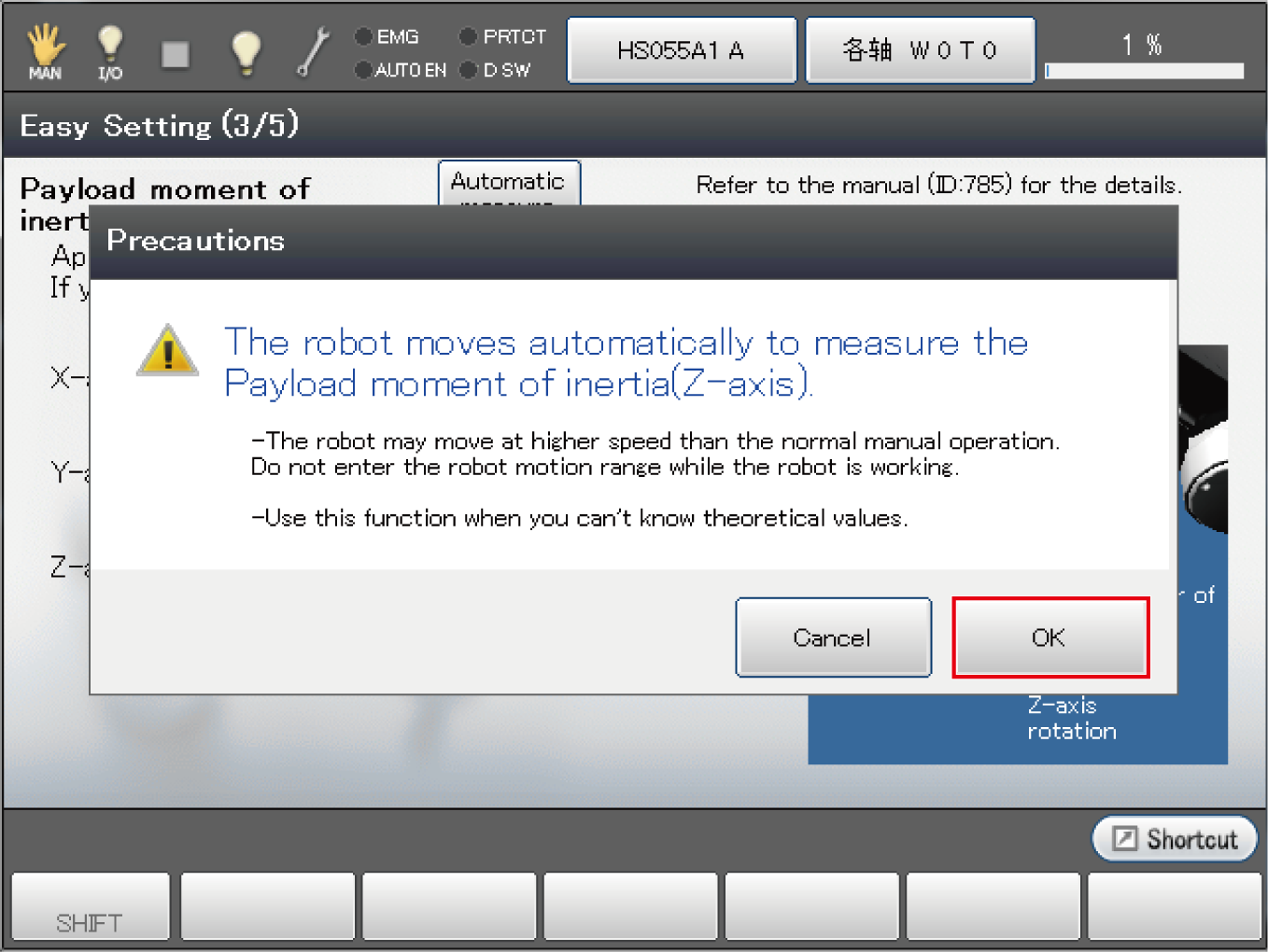
负载重心惯量推断画面中将显示机器人的动作方式,以及测量时的注意事项。
确认后,按[OK]按钮。
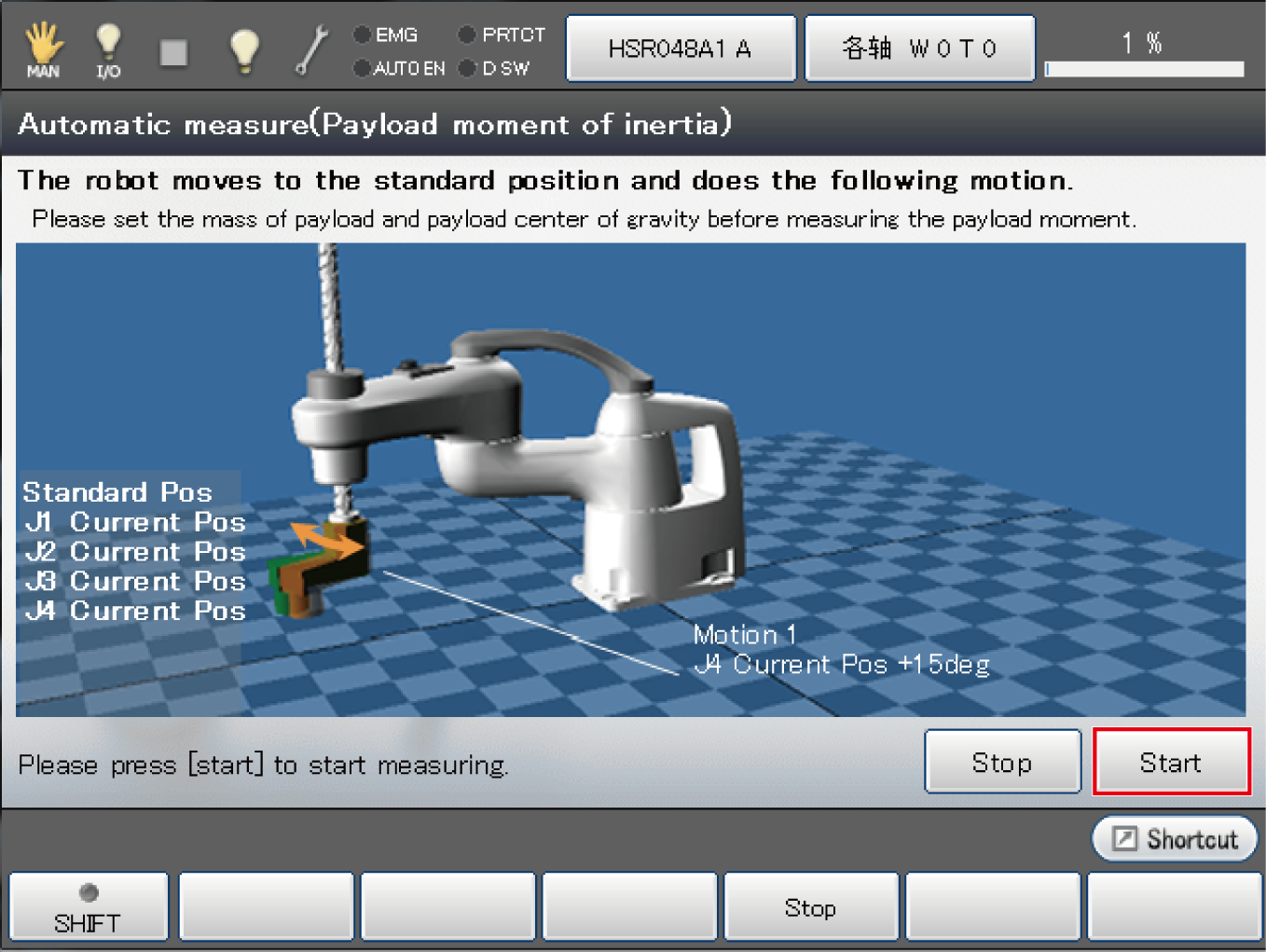
显示自动测量画面。
按[开始]按钮。
2
一边按压双重安全开关一边按压[MOTOR]键,接通电机,按OK键。
执行低速动作测量。
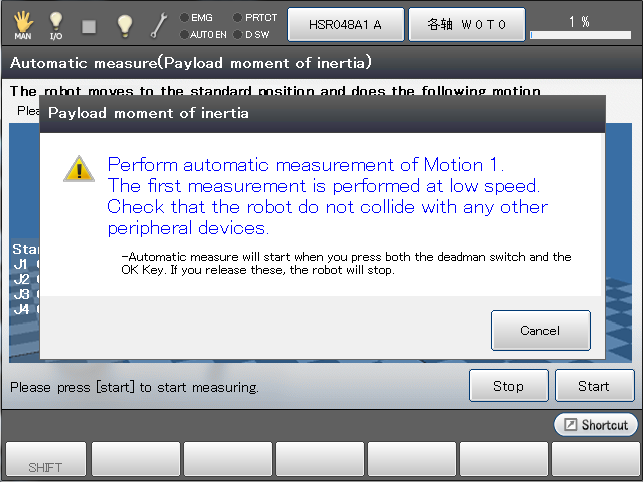
- 请确认夹治具等不与设备干涉。
- 由于可能以高于一般手动动作的速度动作,请勿靠近机器人的运行范围。
(执行中的画面)
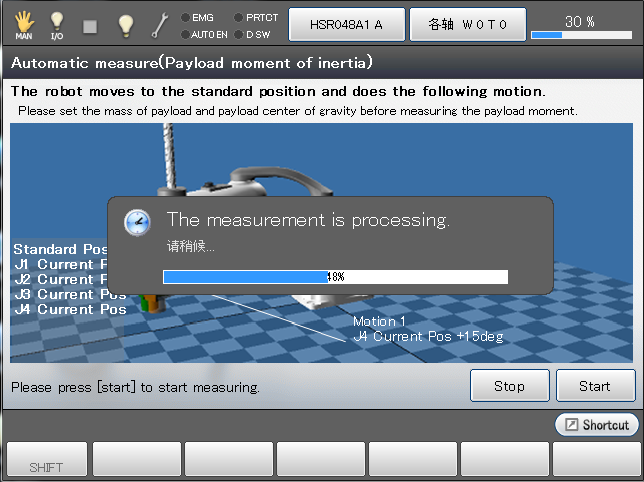
一直按住双重安全开关和OK键,直到测量完成。
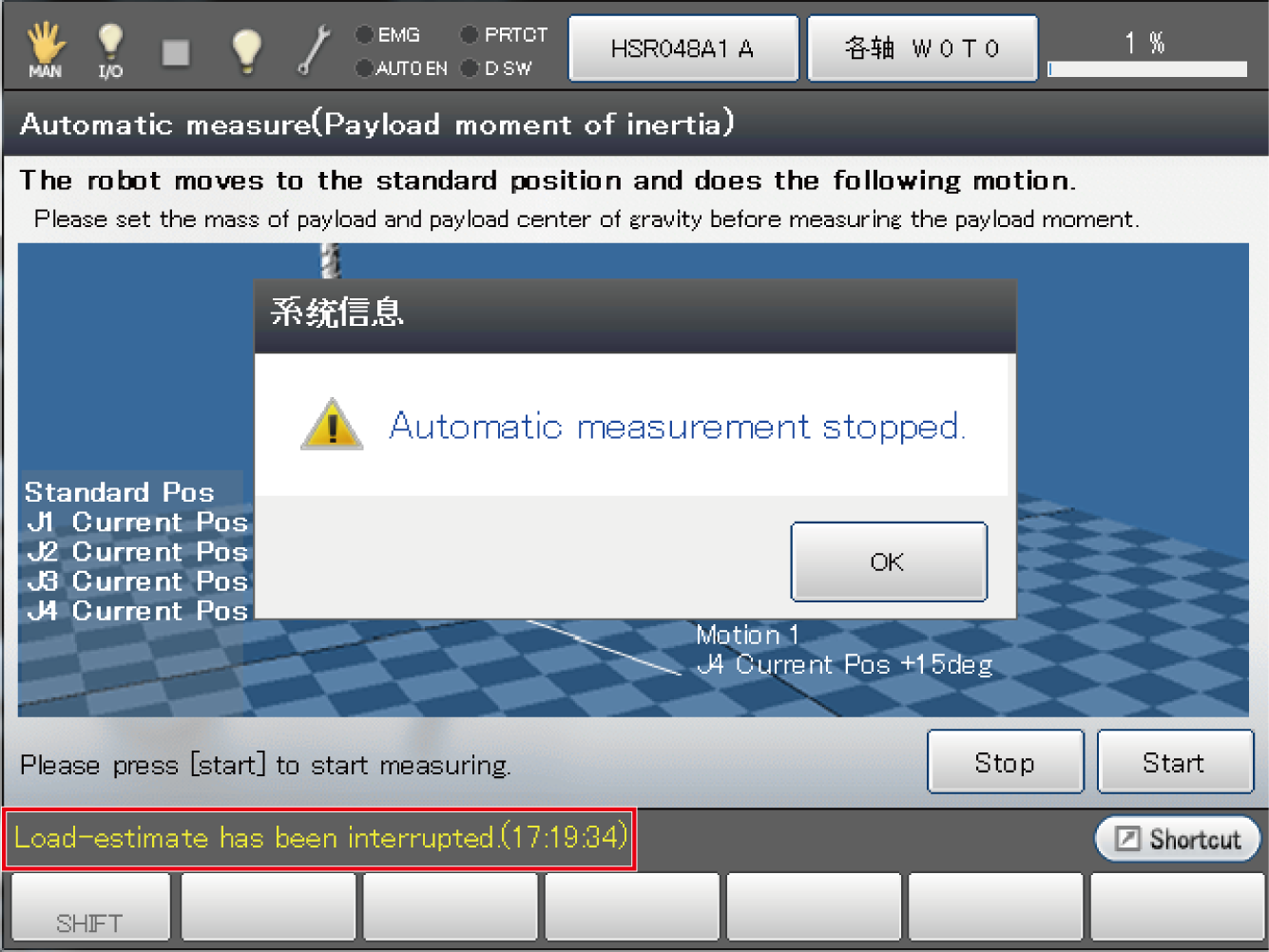
如果在测量中松开双重安全开关或OK键,测量中断。
3
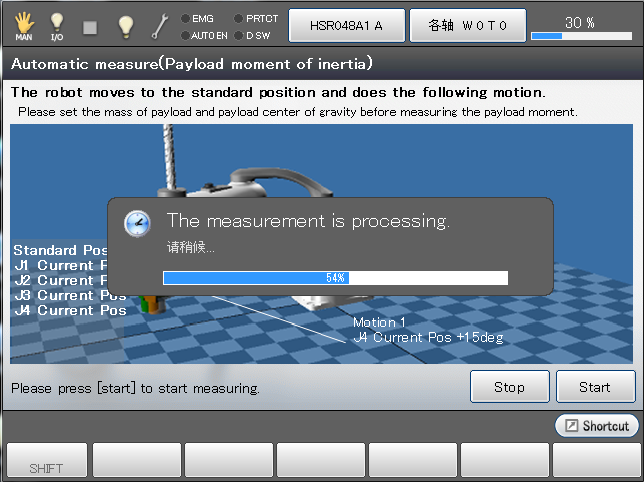
低速动作测量完成后,执行高速动作测量。
继续按住双重安全开关与OK键。
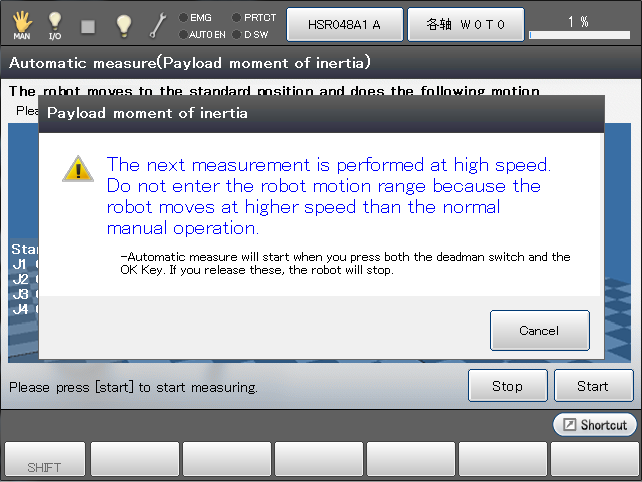
由于机器人会进行高速动作,因此请勿进入机器人的运行范围。
(执行中的画面)
4
当测量值在最大允许范围内时,测量完成。
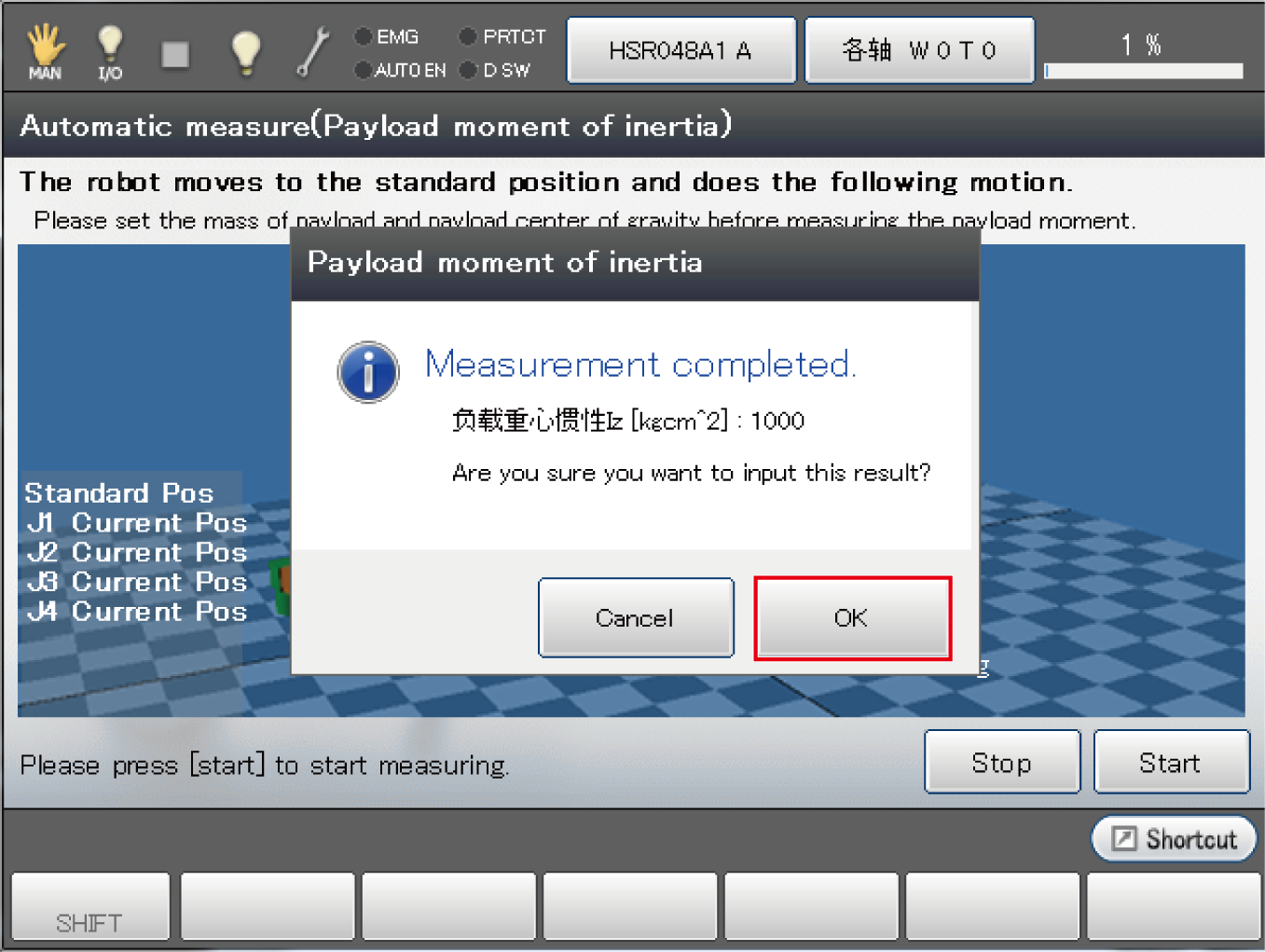
按[OK]按钮后,返回[简单设定]画面。此时将自动输入测量值。
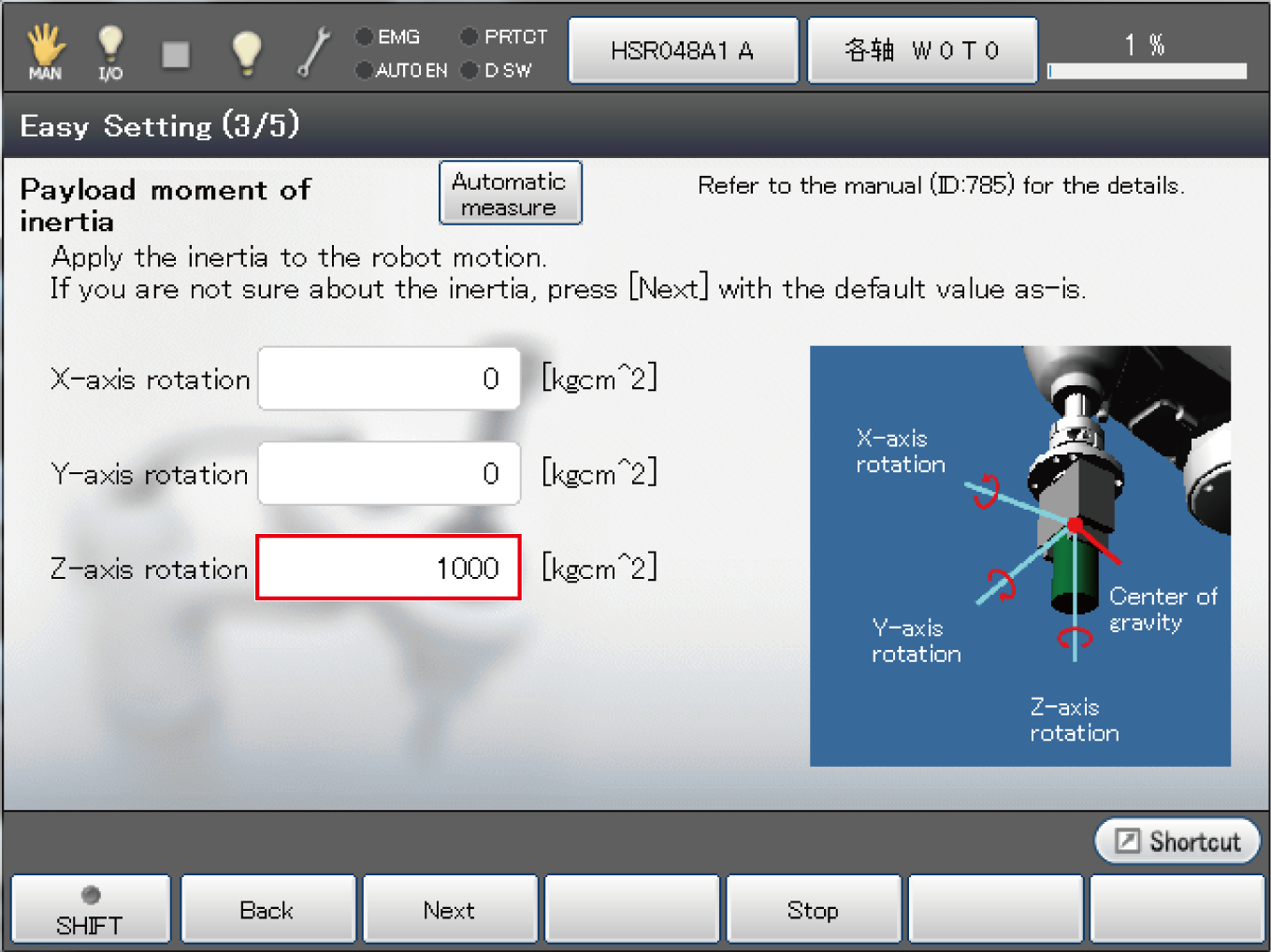
| 1 | HSR、HSA1中,由于不推断X轴旋转、Y轴旋转的值,请根据需要直接输入值。 |
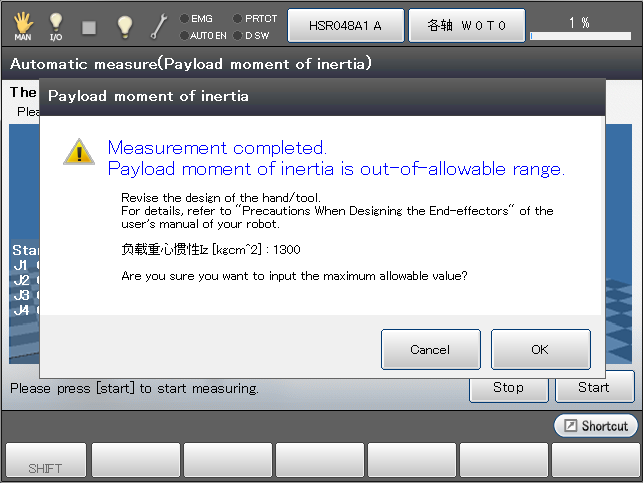
| 2 | 超出最大允许范围时,显示下述的消息。
|
| 3 | 请注意,在自动测量画面中按“Cancel”返回[简单设定] - [前端负载质量]设定画面时不会输入测量值。 |

ID : 3062