
ID : 2987
MC_ReadAxesGroup
从机器人控制器获取机器人的动作状况等信息,存储到数据块"DB_DENSO_ROBOTS (DB2990)"中的变量"Robots[n]"中。
| 图形显示 | FB编号 | FB范畴 |
|---|---|---|
 |
FB2301 | 特殊 |
输入参数
| 参数名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| AxesGroup | Int | 1以上 | 1 | 不可以 |
|
||||
| InAddress | HW_IO | - | - | 不可以 |
|
||||
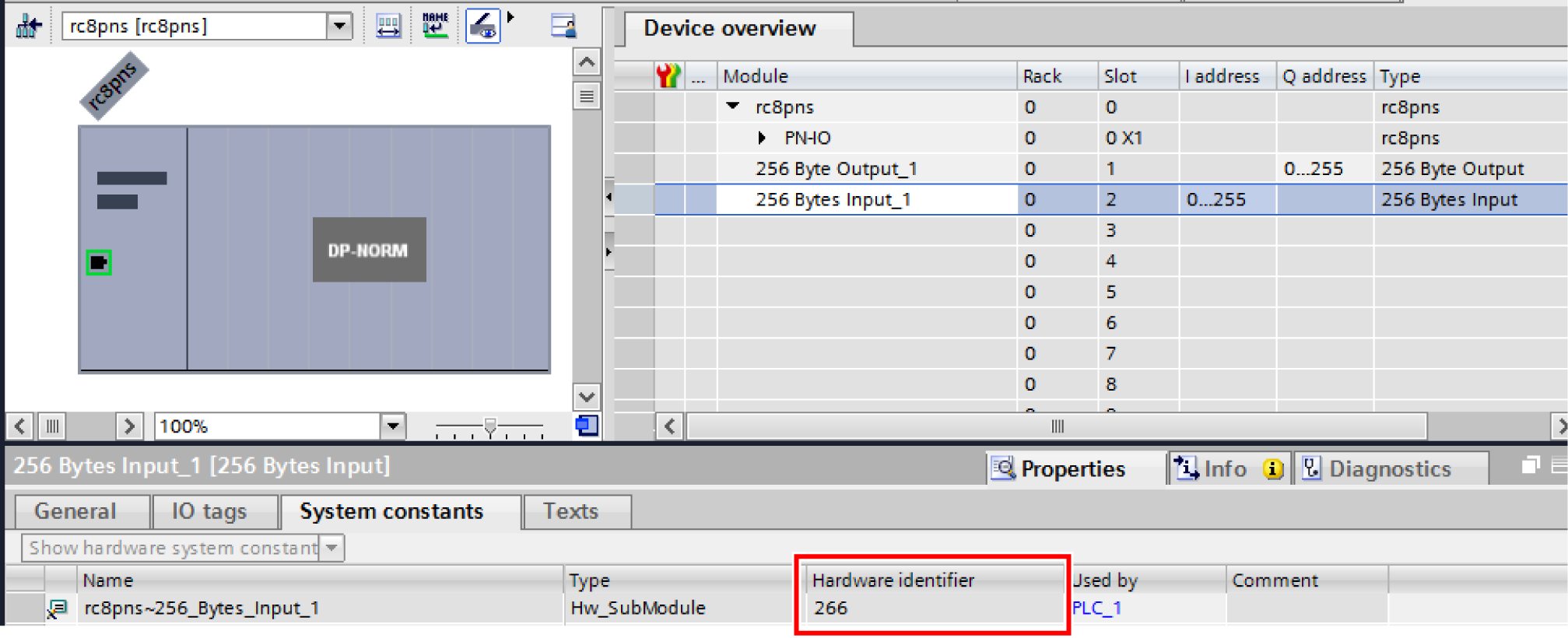
关于硬件标识符
硬件标识符是,使用"TIA Portal V14"进行CPU(PLC)的硬件配置后,"TIA Portal V14"自动配置给各装置的编号。
机器人控制器的输入数据作为PROFINET IO的输入模块设定,所以在输入参数"InAddress"中指定该输入模块的硬件标识符。
例如,下图所示的设定的情况,在输入参数"InAddress"中指定"266"。
输出参数
-
功能说明
实际上,在数据块"DB_DENSO_ROBOTS (DB2990)"中的、变量"Robots[n]"中的变量"Status"中存储机器人控制器的信息。
注意事项
通过这个FB更新的变量"Status"(*1) 的值用于通过Command-Slave的其他FB控制机器人。如果变量"Status"的值旧,Command-Slave其他的FB有可能无法正确控制机器人。
因此,请将这个FB配置到程序的开始位置,始终使输入参数"EN"为TRUE。
*1 : 变量"Status"是数据块"DB_DENSO_ROBOTS (DB2990)"中的变量"Robots[n]"中的变量。
ID : 2987