
ID : 2785
基准位置登录步骤
1
在WINCAPSIII打开登录基准位置的机器人项目。
2
在菜单中进行以下选择。
[工具]-[简易位置补偿]
3
与机器人控制器连接。
4
显示[简易位置补偿]对话框后,选择[登录基准位置]。
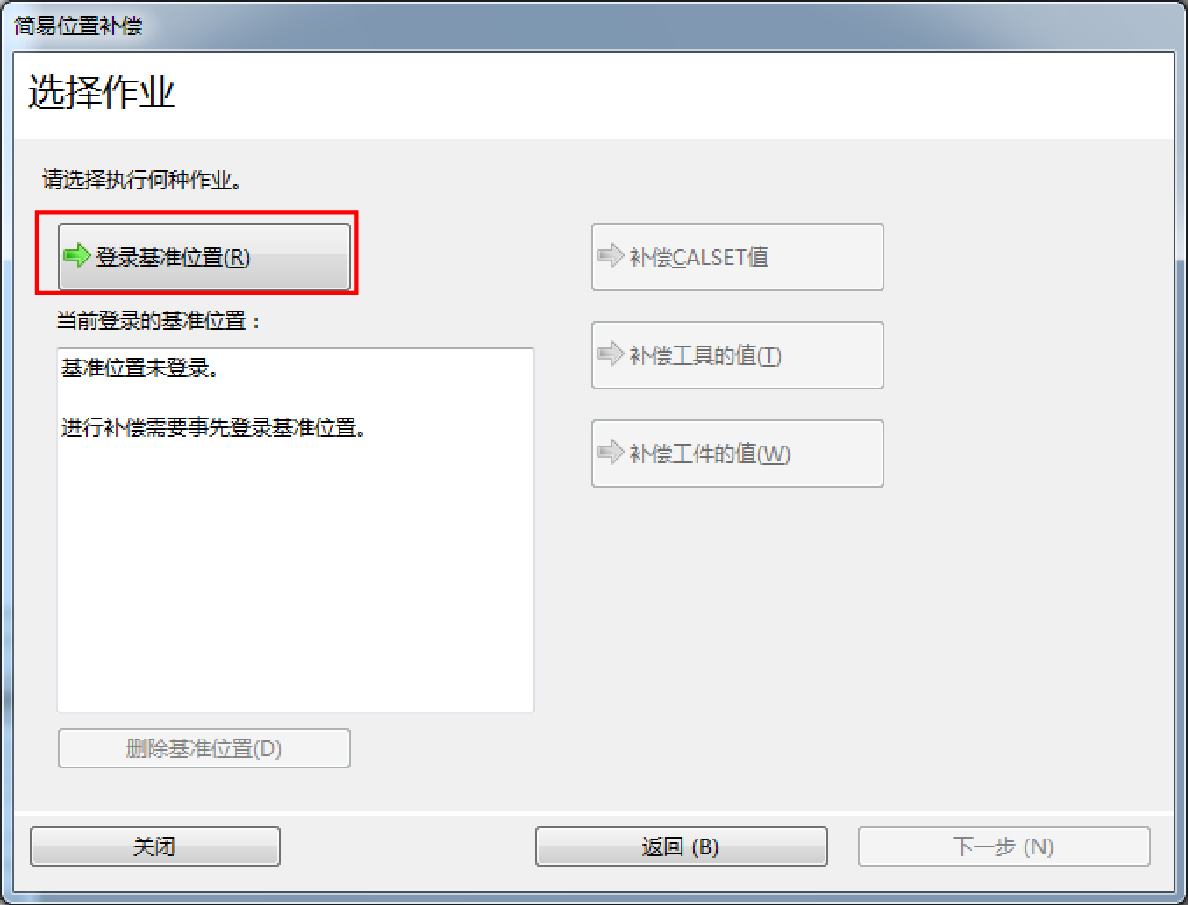
将显示“登录基准位置之前的准备”的消息,确认已准备好,按[OK]。
5
将机器人示教到创建的基准位置后按[追加],机器人的当前位置被登录到基准位置数据。
选择登录的基准位置数据后按[变更],覆盖机器人的当前位置。
选择登录的基准位置数据后按[删除],选择的基准位置数据被删除。
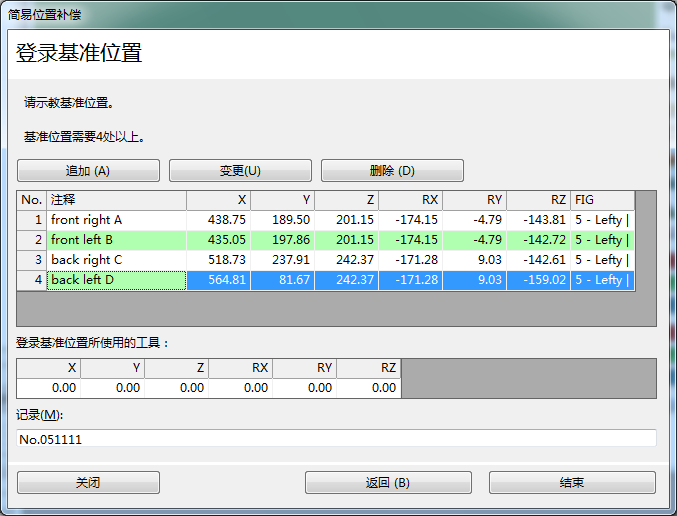

基准位置登录得越多,补偿精度越高。
如果将基准位置示教为全部轴运动,补偿精度提高。
预先在注释栏、备忘录栏记述登录位置的名称,易于识别。
6
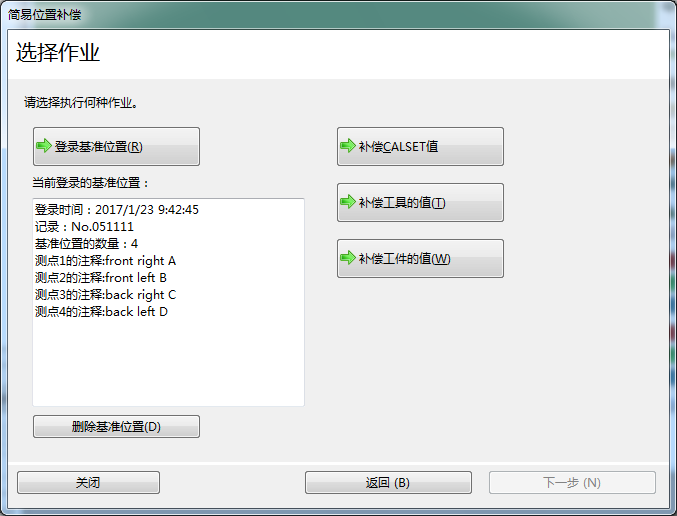
登录全部基准位置后,按[完成]。
将显示被登录的基准位置数据的概要,确认后关闭。
由于登录的基准位置数据保存在WINCAPSIII项目中,因此关闭项目时请务必保存。
ID : 2785